[:es]Mi propuesta para el trabajo de la asignatura es hacer un robot tipo DYOR inspirado en el personaje de Stella (un hada), de la serie Winx Club.
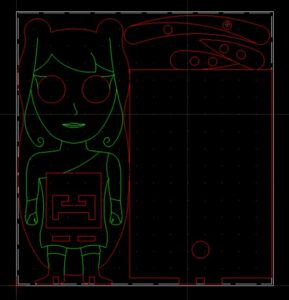
Para el diseño del robot he utilizado la técnica de corte laser sobre una tablilla de madre, con el programa QCADCAM he creado el diseño.
Aplicaciones:
Camino libre evita obstáculos
El robot seguirá recto hasta encontrarse un objeto enfrente, detectado por el sonar HC-SR04, cambiando la trayectoria para evitar el objeto.
Seguir la luz
Haciendo uso de los sensores de luz KY-018, el robot seguirá la luz de una linterna, el este vídeo se muestra como el robot sigue la luz del flash de grabación.
Enchantix
Cuando se active esta función el robot moverá las alas con los servomotores SG90 y se mostrará un dibujo en la matiz de leds, mientras en el buzzer pasivo KY-006 la música de la serie.
Electrónica utilizada:
- Arduino Nano v3.0
- I/O Extension Shield para Arduino
- Pila alcalina 9V
- Cable para conectar la pila 9V al Arduino
- Módulo Bluetooth HC-06 ( Aunque yo haya tenido un problema con la conexión del módulo bluetooth, este seria una opción para enviar por bluetooth el Arduino nano a la información de la APP)
- Servomotor SG90 x2
- Servomotor FS90R x2
- Ruedas para servomotor FS90R x2
- Rueda caster
- Sensor de ultrasonidos HC-SR04
- Buzzer pasivo HY-006
- Sensor de luz LDR KY-018 x2
- Matriz de LEDs 8×8
- Cables puente tipo hembra-hembra
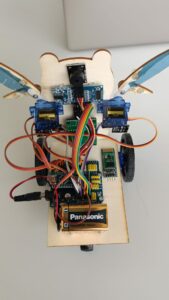
Conexionado de la electrónica a la placa de Arduino.
Dificultades:
He tenido problemas conectando el módulo de bluetooth HC-06 a mi dispositivo móvil, por lo que finalmente aun teniendo la app de control de los diferentes funcionamientos del robot desarrollada, no he podido hacer uso de ella.

Este era el diseño de app que había propuesto, con un botón para conectarse al bluetooth del DYOR y otro para desconectarse, en la parte inferior los 4 botones para los 4 funcionamientos que inicialmente tenía pensados para el robot, finalmente el programa de seguimiento de líneas no he podido desarrollarlo correctamente.
[:]