Este proyecto hecho para la asignatura de Robótica Móvil de la Universidad Politécnica de Valencia está basado en el robot DYOR, que tiene dos ruedas controladas por motores y una rueda loca. Como se ve en la imagen, el robot es una copia de WALL E de la película de Disney. Como funciones autónomas tiene seguir lineas y esquiva obstáculos.

LISTA DE COMPONENTES
- Original Arduino Uno Rev3
- AZDelivery Prototyping Shield + Placa de Pruebas Mini Breadboard
- DollaTek Mini Drive Controlador de Motor L298N
- Chasis Speed Encoder para Arduino
- 2 TCRT5000 Sensores fotoeléctricos de infrarrojos
- Módulo de distancia ultrasónica HC-SR04
- Módulo Bluetooth HC-05
- Micro Servo Motor de rotación continua FS90R
DISEÑO
Lo más destacable del diseño es el cuello y cabeza del robot. Articulado con el micro Servo FS90R se consigue que la cabeza oriente el modulo de ultrasonido hacia la izquierda y la derecha.


PROGRAMACIÓN
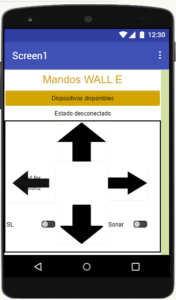
Este robot se controla mediante una aplicación móvil llamada Arduino Car, aunque también es compatible con una que se diseñó pensada para este robot a través de la aplicación de app inventor
 .
.
El Código se hizo en Arduino IDE
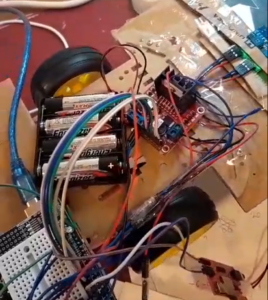
MONTAJE
El montaje es sencillo, todos los componentes se encuentran pegados a la tabla del kit de Arduino y sobre este, se coloca la caja que se cierra por la parte de arriba haciendo uso de dos agujeros hechos en la tapa al acoplar el cuello.


FUNCIONES
Testeo Seguilineas:
Testeo detección de obstáculos:
Función Manual:
Dentro de la función manual se pueden apretar los botones de la interfaz, que incluyen las funciones:
- Moverse hacia delante
- Moverse hacia atrás
- Girar hacia la derecha
- Girar hacia la izquierda
- Activar SL (Funcion siguelineas)
- Activar Sonar (Funcion detección de obstaculos)
Proyecto realizado por Carlos Cascón Reyes