En esta entrada se explicará en breve el proceso de construcción y programación del robot RAMBOSO.
Algunas de sus funciones son:
- presentación de sí mismo
- disparar a todo lo que encuentra
- controlar el camino (seguir lineas y enviar mensajes con la pistola lista para disparar)
- evitar obstaculos
MATERIALES y COMPONENTES:
- estructura en metal
- servos continuos FS90R con ruedas (2)
- servos SG90 con brazos en metal (2)
- Arduino Nano
- powerbank
- OLED display 128*32
- RGB LEDs
- seguidor de lineas
- bluetooth
- sonar
- zumbador
- cables
- rueda giratoria
- cinta adhesiva y aislante
- tornillos y destornillador
- bandas para el pelo
- placa imprimida en 3D con collar de metal
PROCEDIMIENTO
ENSAMBLAJE
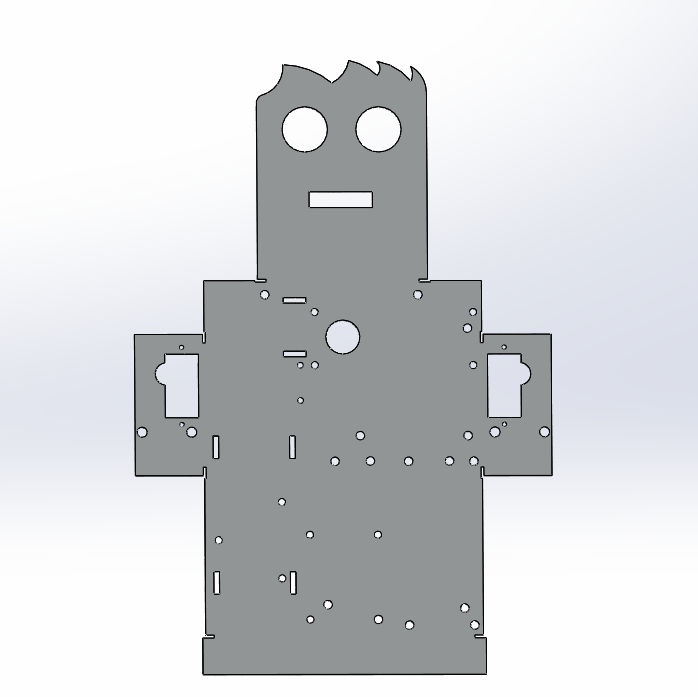
La construcción física del robot empezó con la dobladura de la lámina de metal, que volvió a ser la estructura del robot. Esta lámina estaba ya preparada con foros de dimensión M3 para facilitar la sujeción de los componentes.
En este caso la lámina tiene particulares dimensiones en la parte de arriba y foros listos para el display OLED.
Luego fue elegido el sitio adonde poner las diferentes partes.

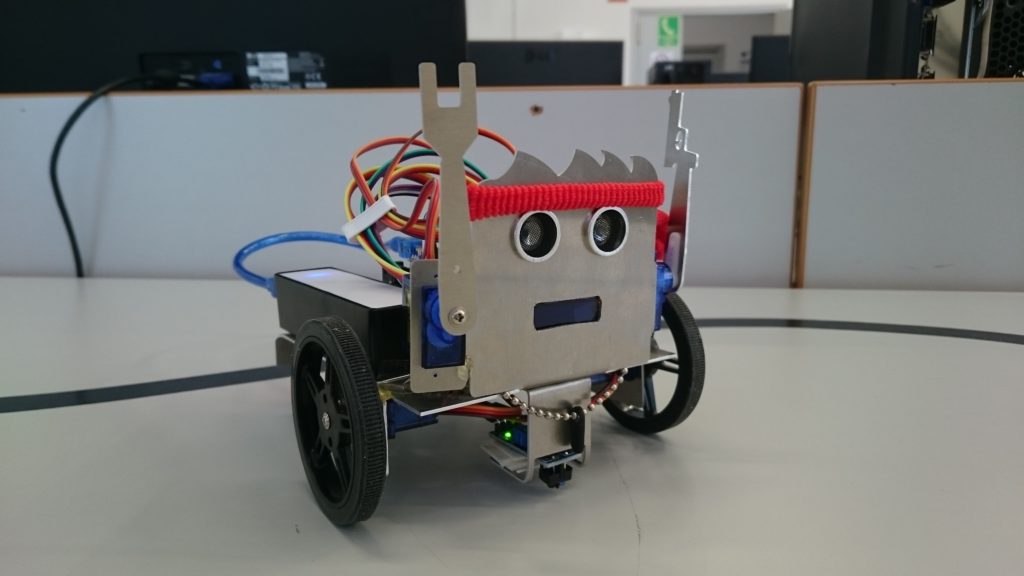
Como se puede ver en esta imagen de hecho en los foros principales hay el sonar, mientras la apertura rectangular muestra el display OLED.

En esta en cambio se pueden ver los componentes: bluetooth y zumbador la izquierda cerca de la rueda, sonar y OLED al centro de los dos servos.
A la derecha se puede ver la powerbank.
Todo fue asegurado con cinta adhesiva de doble cara, islante y tornillos

En la parte de abajo fueron posicionados los servos continuos y el sensor infrarrojo necesario para el seguimiento de caminos.
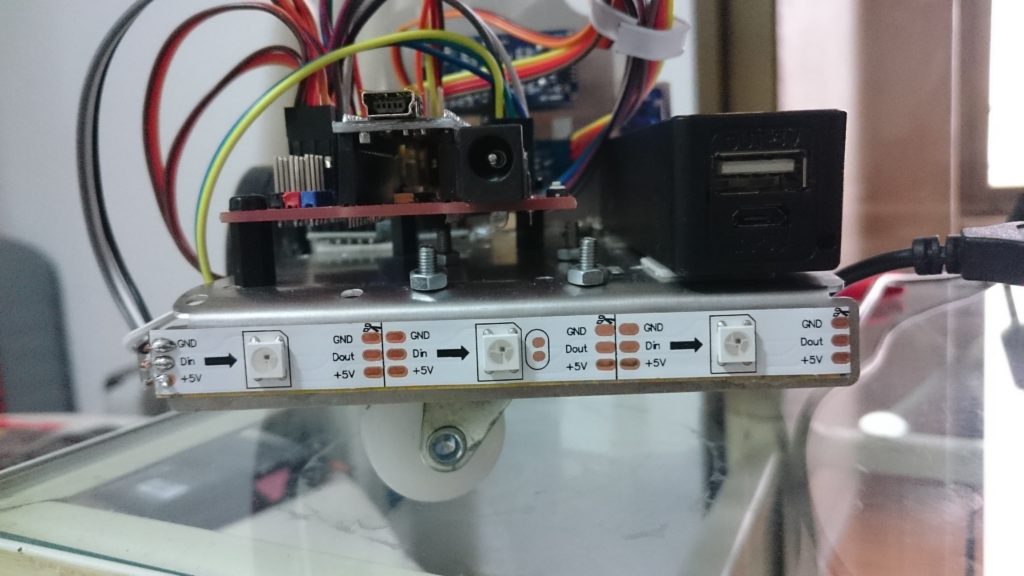
Y detrás fue posicionada la tira de tres LEDs RGB.
Estos necesitaron una soldatura al principio del primer LED desde el momento que no hay otro enganche posible con los cables.

Todos los componentes se han conectados con el Arduino Nano con cables.
A segunda de la función necesaria hay pines digitales y analogicos disponibles, aunque en realidad los pines analogicos pueden ser utilizados como digitales también. Esta diferencia es útil para la lectura de unos sensores como por ejemplo el infrarrojo, que se ha puesto en uno analógico.
El paso final fue la subida del codigo y la conexión con la powerbank mediante cable USB.
FACILINO y ARDUINO IDE
El primer paso una vez que el ensemblaje fue terminado, fue la programación de Arduino. Esto fue posible con el esquema a bloques que se puede encontrar en la pagina: https://roboticafacil.es/facilino/blockly/Facilino.html
El metodo a bloques utilizado es muy rapido de aprender y permite una introducción a este mundo también a quien no tiene mucha experiencia con Arduino o de programación en general.
Como se puede ver en la imagen

uno de los bloques basico tiene una parte de setup adonde está posible insertar los comandos que se quiere sean leidos una sola vez. Mientras en la parte de loop se insertan los que se quiere sean leidos en loop, cíclicamente.
Facilino contiene bloques para cada componente y con licencia es posible utilizar más funciones respecto a la versión basica.
Una vez que el esquema está completo es necesario subirlo en Arduino. Este paso se puede hacer con el programa Arduino IDE.
El orden vuelve a ser el siguiente:
- creacción del esquema a bloques con Facilino
- copia del codigo en el programa Arduino IDE
- subida del código al hardware
Una vez que el Arduino (hardware) recibe el código está listo para ser utilizado. El signal que indica si el codigo ha terminado de cargarse es costituido de dos luces verdes en la parte arriba del hardware.
APPINVENTOR 2
Para controlar y enviar comandos al Arduino mediante bluetooth, una vez programado, fue necesario crear una applicación. Esto fue posible gracias a AppInventor 2, creada por parte de MIT y utilizable simplemente con un account Google.
Página web: http://ai2.appinventor.mit.edu/
Esta página permite la creacción de una applicación para moviles, en manera bastante rapida y simple, utilizando esquemas a bloques como Facilino. Es necesario solo empezar un nuevo proyecto una vez hecho el login.

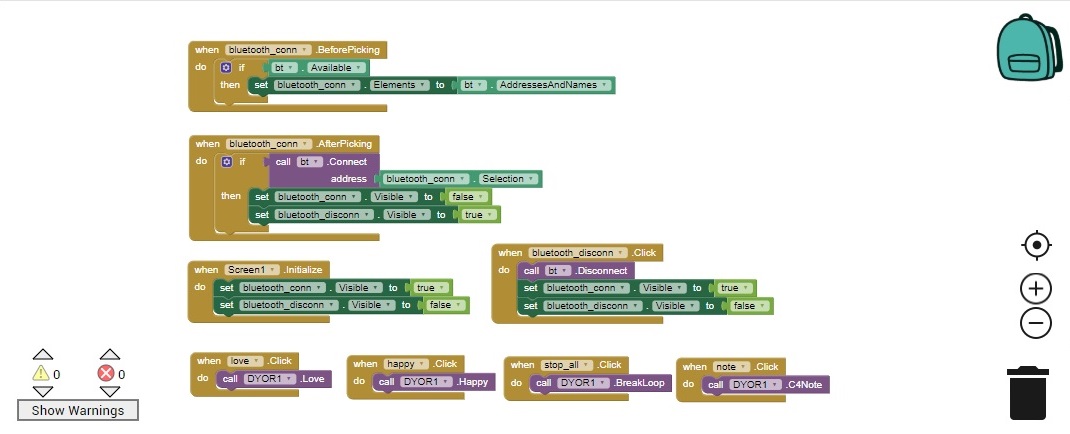
Como se puede ver en las imagenes hay dos partes adentro de un proyecto:
- designer – area dedicada a la creacción y gestión de la parte gráfica
- blocks – area dedicada a la creacción y gestión de los comandos
El primer paso es la creacción de tastos, de forma y color deseados en la area designer. Es posible utilizar también imagenes y iconas en lugar de texto normal.
Una vez hecha la parte gráfica es necesario decidir que comandos envian los diferentes pulsantes y esto es posible en la otra area. Se utilizan esquemas a bloques ya vistos. Aquí está posible elegir muchas opciones, como cuales son los botones que tienen que verse cuando se executa la App, que sensibilidad dar a los comandos, ecc. Es posible incluir también acelerometros, reprodución de sonidos y video en el móvil.
La applicación envia mediante bluetooth bytes que Arduino recibe y lee como comandos. En Facilino estan escritos todos los comandos existentes. Es importante saber que los bytes enviables son 256, desde 0 hasta 255, y es posible crear comandos solo enviando el byte que corresponde a una instrucción especifica contenida en el codigo de Arduino.

En esta foto se muestra la App del robot Ramboso, con las funciones de:
- movimientos basicos con pulsantes
- movimientos basicos con acelerómetro y valores de aceleración en x/y
- reproducción de voz y sonidos
- movimiento de los brazos
- seguidor de lineas
- evita obstaculos
- conexión/disconexión bluetooth
- «Mission complete» (texto en el display, LEDs colorados, sonido, movimientos)
PRÁCTICA
En los siguientes videos de YouTube se puede ver una demonstracción práctica del robot descrito.
Gracias por vuestra atención!