En esta publicación se muestra la versión del Cybertruck, llevada a cabo mediante diseño 3D, Arduino y cuatro motores.

El proyecto implica la creación de un vehículo de control remoto basado en el cybertruck, utilizando la placa de microcontrolador Arduino UNO. Las funciones incluyen mediante el diseño de una App: un sistema de evasión de obstáculos, un control remoto con mando y acelerómetro y siguelíneas.
DISEÑO
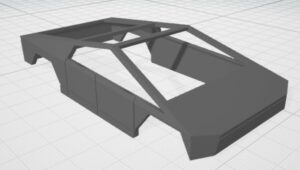
Para el diseño del robot, diferenciamos entre la base y el chasis. Primero busqué el diseño 3D y una vez con las medidas diseñé la base con AutoCAD.
Aquí tenemos el chasis del robot. Elegí este porque era con el que más espacio tenía para poner los componentes. Las medidas que tiene son 29.5 cm de largo, 15 cm de ancho y 8 cm de alto.
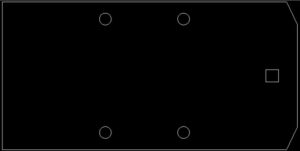
El diseño de la base lo hice mediante AutoCAD ajustandome a las medidas del chasis.
COMPONENTES
Para poder realizar todas las funciones del sistema hemos necesitado:
- Placa Arduino UNO.
- Motor shield l293d (control de 4 motores).
- Módulo bluetooth HC-05.
- Sensor HC-SR04.
- 2 sensores TCRT5000.
- Portapilas y pila de 9 V.
- 4 motores reductores con 4 ruedas.
CONEXIONES
Sobre el driver de motores, hemos de tener en cuenta que al controlar 4 motores solo quedan libres los pines 9 y 10 digitales y todos los analógicos.
El pin 9 lo he aprovechado para conectar el pin TX del módulo bluetooth, no conecto el RX ya que no necesito recibir información del módulo, solo envío información desde la App.
Los dos TCRT5000 los he conectado a los pines analógicos 0 y 1. El HC-SR04 en el pin 2 está conectado el Echo y en el pin 3 el Trigger.
Los motores y la pila están conectados a los terminales que indican del driver de motores. Dependiendo de la conexión de los cables en los motores girar el motor en un sentido u otro, también se ha de recalcar que estos motores tienen una banda muerta bastante amplia, lo cual complica su uso.
APP Y APLICACIONES
El robot se controla mediante la aplicación diseñada en la página web de appinventor. La App consta de una pantalla principal con información y la selección del modo.
Interfaz principal:

En este momento podemos elegir cualquier modo. Vamos a comentar los diferentes modos del robot.
SalvaObstáculos
En primer lugar, tenemos que conectar el bluetooth y una vez conectado le daremos al botón Iniciar, el cual envía una letra al módulo bluetooth y este ya mediante el código realizará la función deseada, en este caso el SalvaObstáculos.
Un inconveniente de mi robot es que al ser bastante ancho existen ángulos muertos donde el sonar no detecta. Una solución sería usar dos sensores.

Vídeo de Salvaobstáculos:
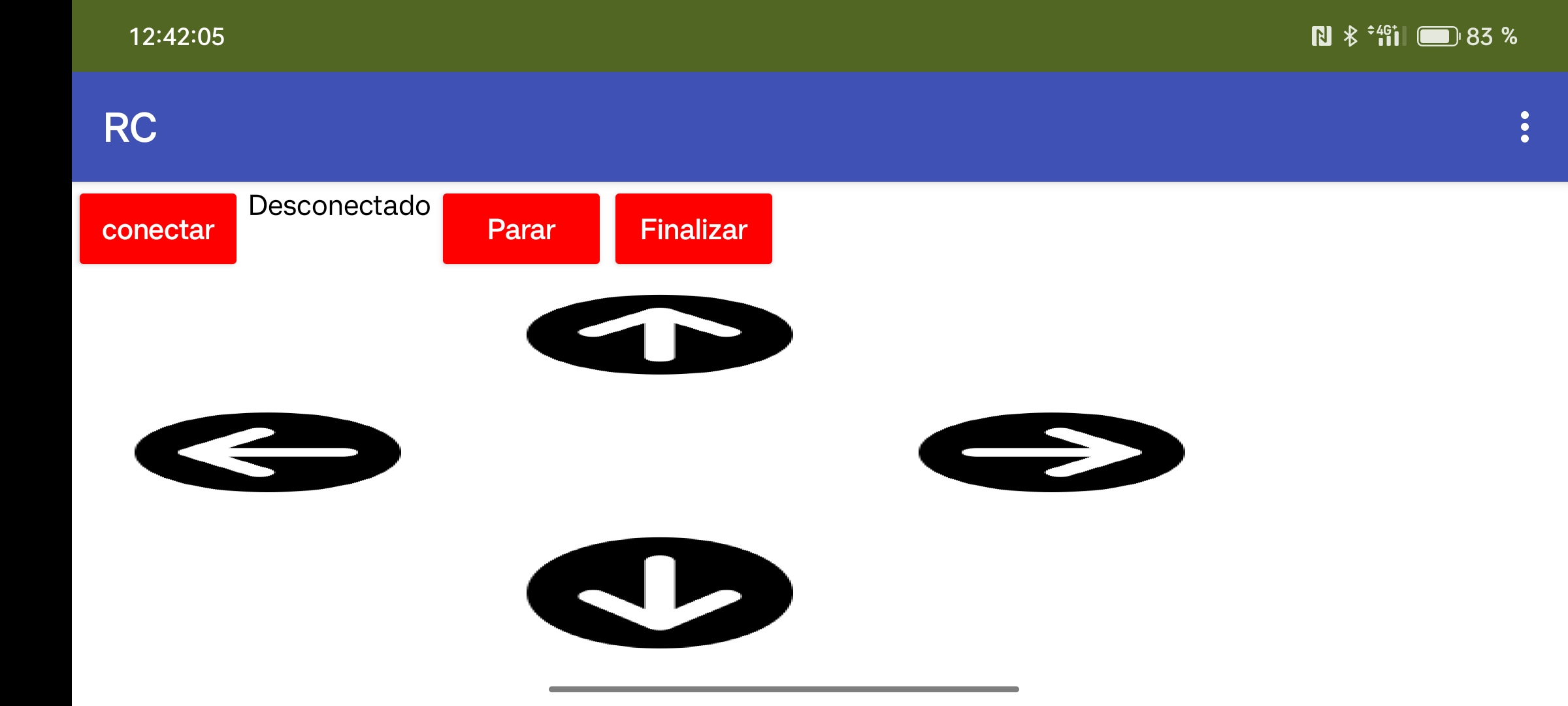
Radio Control
Al igual que en todas las pantallas, primero conectamos el bluetooth y cuando le das a cualquier flecha el robot empieza a moverse en el sentido que se le indique.
Vídeo del RC:
Acelerómetro
Funcionamiento parecido al del Radio Control.

Vídeo del Acelerómetro:
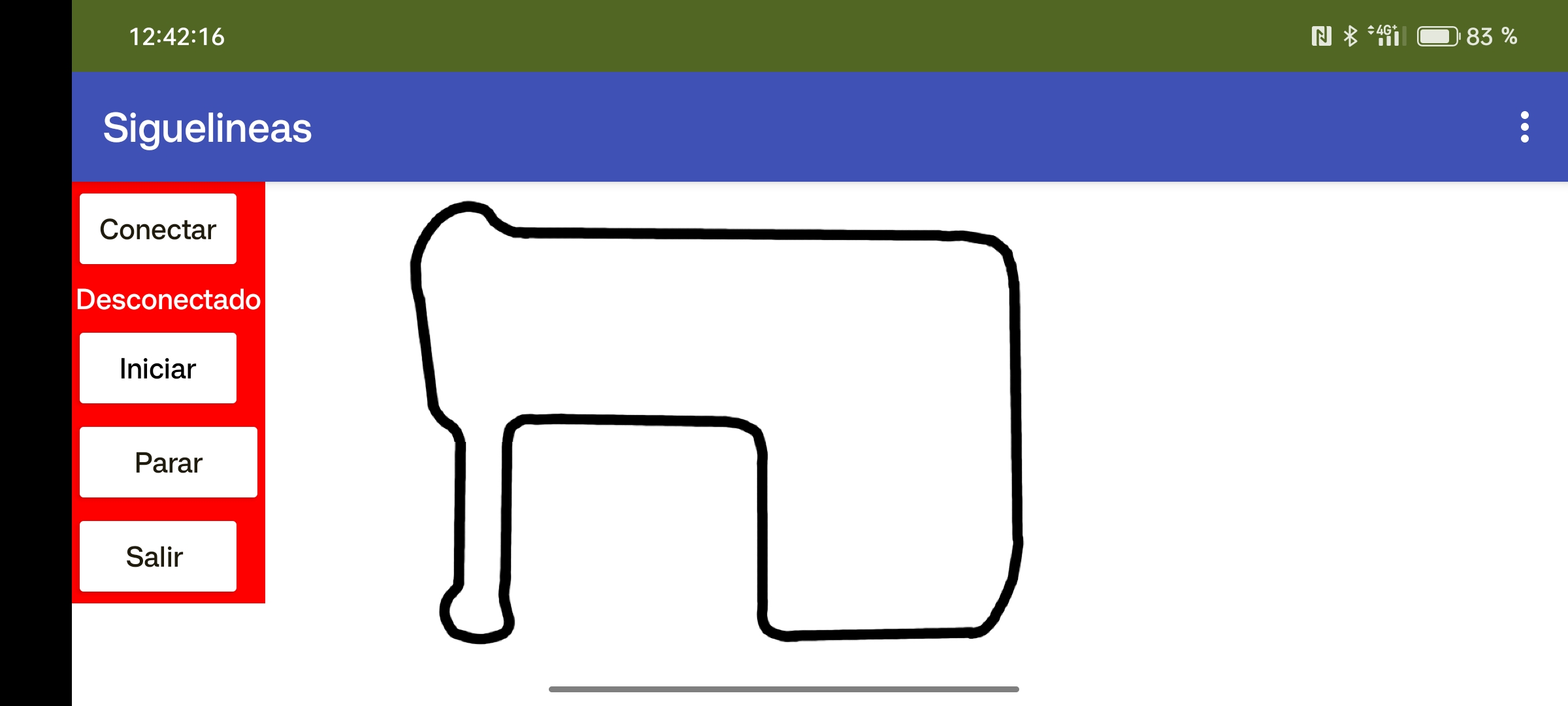
Siguelíneas
El siguelíneas ha sido el más complicado debido al tipo de robot. El tener 4 motores hace que este deslice y sea más complicado que siga la línea.
Vídeo del Siguelíneas:
INFORMACIÓN ADICIONAL
Aquí dejo un enlace al diseño 3D y más: https://drive.google.com/file/d/1xlg7YRQu2hLCdqCoLmX0Jjz1X3AftCBb/view?usp=drive_link
Autor
Hugo Gallú Camús