En esta entrada se muestra el robot Bimbo, con el diseño del robot DYOR Corte Láser.
Robot Bimbo
Diseño
El diseño es el mismo que el modelo «SteveBot» del robot DYOR Corte Láser que se puede encontrar en la tienda:

Componentes
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Ultrasonido HC-SR04
- Zumbador
- 2xServos SG90
- 2xServos FS90R
- Bluetooth
- Seguilíneas TCRT5000
- Rueda loca
- Ruedas FS90R
- Matriz de LEDs
Cableado
Las conexiones entre los componentes y el Arduino se han realizado de la siguiente forma:
- Módulo Bluetooth HC-05: TX a Pin D2, RX a Pin D4
- Zumbador: Pin D3
- Ultrasonido HC-SR04: Echo a Pin D12, Trigger a Pin D13
- Servos FS90R continuo: Pin D8 y Pin D9 (Derecha e Izquierda)
- Servos SG90: Pin D11 y Pin D10 (Derecha e Izquierda)
- Matriz de LEDs: CS a Pin D6, DIN a Pin D5, CLK a Pin D7
- Seguilíneas TCRT5000: Pin A7 (Modo analógico)
Funcionamiento
Mediante la aplicación de móvil se escoge el modo de funcionamiento del robot con una lista:


Direcciones
Una vez elegido el modo direcciones y apretado START nos llevará a la pantalla de direcciones:
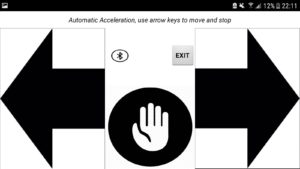
Para poder empezar a controlar a Bimbo se debe conectarse a él mediante Bluetooth con el icono de bluetooth. Pasados 3 segundos el robot empezará a acelerar en línea recta automáticamente, se usan los botones en la pantalla para manejarlo o detenerlo.
Si se pulsa las flechas de dirección durante 2 segundos, el robot empezará a rodar sobre sí mismo en esa dirección hasta que se suelte. Lo mismo ocurre con el botón de Stop, pasados 2 segundos el robot dará marcha atrás hasta que se suelte el botón.
Pulsando el botón EXIT el robot se detiene y la app vuelve a la pantalla de selección de modo.
Acelerómetro
Al conectarse al robot, se podrá controlar la dirección del robot mediante el acelerómetro del móvil. Con 4 direcciones, delante, izquierda y derecha(sobre sí mismo) y hacia atrás.
Pulsando el botón de EXIT se volverá nuevamente a la pantalla de selección de modo.
Control de voz

Una vez conectado al bluetooth del robot, se pulsa el botón del micrófono y se dice uno de los siguientes comandos de voz:
- «Delante»: Avanza durante un breve tiempo
- «Atrás»: Retrocede durante un breve tiempo
- «Derecha»: Realiza un giro hacia la derecha de 90 grados
- «Izquierda»: Realiza un giro hacia la izquierda de 90 grados
- «Pico»: Baja y sube la mano del pico
- «Espada»: Baja y sube la mano de la espada
Como medida de seguridad, se puede pulsar el botón de Stop en la aplicación para detener al robot en cualquier momento.
Siguelíneas

Una vez conectado al robot, éste empezará a seguir el borde derecho de una línea negra. Se puede detener y reanudar esta tarea pulsando el botón de Stop.
Sadi M. Yilmaz Asignatura Robótica Móvil