[:es]En esta entrada os mostramos un nuevo diseño del robot DYOR basado en el droide de combate de una famosa saga.
Robot Roger
Diseño:
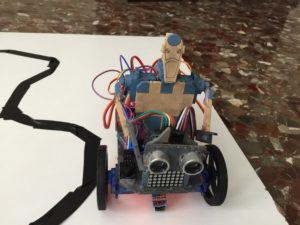
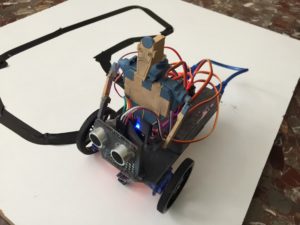
El robot está basado en el droide de combate B1, a bordo de un vehículo de reconocimiento.
Los brazos y el cuello del robot están articulados. En el extremo de cada brazo cuenta con un utensilio diferente: una pistola láser y un walkie-talkie.
Las piezas no electrónicas del robot están fabricadas con madera, mayoritariamente a partir de corte láser. Han sido pintadas a mano utilizando tres mezclas: ocre y marfil para la base, azul para las insignias y algunos acabados y gris para la base del vehículo. Posteriormente se le ha dado una capa de envejecido metálico con acrílico grafito muy diluido con agua.

Funcionalidad:
El robot cuenta con 3 modos autónomos y uno manual, todos ellos activados desde una aplicación para Android.
Al conectarse el robot a la alimentación eléctrica, los brazos se colocan inclinados hacia el suelo y la cabeza mira al frente. Acto seguido suena una estrofa de la famosa melodía de Star Wars. Desde la app se puede conectar el móvil con el bluetooth del robot para accionar los distintos modos.
-El primer modo autónomo es el «Modo cobarde»: vigila rotando sobre sí mismo hasta que detecta (mediante el sónar) alguna presencia demasiado cercana. En ese momento, aparece un signo de exclamación en la matriz de LEDs, exclama «Oh oh!» (mp3 de la app), se rinde poniendo los brazos en alto, grita de miedo (buzzer), escapa dando marcha atrás, rotando y huyendo hacia adelante. Cuando encuentra dos obstáculos seguidos asume que ha encontrado una esquina y está a cubierto, mira alrededor (giro del cuello), asume que el peligro ha pasado, rota sobre sí mismo y busca en bucle un lugar en campo abierto (con suficiente espacio alrededor) desde el que comenzar de nuevo.
-El segundo modo autónomo es el «Modo valiente»: primero el buzzer hace sonar una estrofa de la canción Duel of the fates apropiada para iniciar la persecución, acto seguido vigila como en el anterior modo autónomo pero, en este caso, cuando detecta una presencia apunta con el arma, aparece una señal de prohibido el paso en la Matriz de LEDs y se lleva el Walkie-Talkie a la altura de la cabeza, quedando a la espera de la orden de ataque desde la app. Cuando se le da la orden, exclama «Roger Roger» (mp3 de la app), realiza una cuenta atrás desde 5 en la Matriz de LEDs y comienza el ataque cuando esta termina, anunciándolo con una X en la matriz de LEDs. EL ataque consiste en que el robot dispara mientras detecte un obstáculo a corta distancia, avanza para volver a encontrarlo si se aleja poco, y asume que el obstáculo se ha rendido y ha huido si la distancia pasa a ser grande, terminando el programa. Si dispara 3 veces seguidas y el obstáculo sigue a corta distancia, asume que ha abatido al obstáculo y también termina el programa, quedando a la espera de nuevas órdenes desde la app.
El disparo láser se ha implementado de la siguiente manera: el servo del brazo que sostiene la pistola se levanta un poco y baja, acto seguido un ascenso y descenso de frecuencia en el buzzer imita el sonido característico de los disparos blaster y, por último, aparece en la Matriz de LEDs la onomatopeya del disparo (PIU).
-El tercer modo autónomo es el sigue líneas. El robot seguirá una línea negra sobre fondo blanco por su flanco derecho. Para ello toma una medida con el sensor infrarrojo colocado en la delantera del vehículo de reconocimiento, compara la medida con el valor medio (la referencia de lo que debería medir el sensor infrarrojo en el punto medio entre el lado negro y el blanco) y aplica un control proporcional que hace que se mueva una rueda o la otra para seguir la línea. Es importante contar con una buena calibración del blanco y el negro.
-El modo manual permite mover el robot mediante botones (adelanta, atrás, giro a ambos lados sobre sí mismo y parada). Además permite acceder a las diferentes funciones que se emplean en los modos autónomos cobarde y valiente: disparo, giro del cuello, llamada por walkie-talkie e interpretación de las 2 melodías mediante el buzzer.
Componentes electrónicos:
Se han utilizado los componentes electrónicos del siguiente pack de DYOR: https://roboticafacil.es/prod/dyor-fabricacion-propia/
Además de un servo SG90 adicional para el movimiento del cuello.
Vídeos:
Conexión bluetooth:
Modo sigue líneas:
Modo manual:
Modo cobarde:
Modo valiente:
Descargas:
El diseño incluye todas las piezas necesarias salvo: unión servo-cuello con cabeza y embellecedor del sónar.
Autor:
Alberto García Fernández
[:]