En esta entrada se explica el procedimiento para diseñar en TinkerCAD el robot DYOR bPED.
El resultado esperado tras seguir los pasos de esta entrada es como el que se muestra:
Primero descargaremos los ficheros STL que necesitaremos para crear los huecos de algunos componentes.
Diseño de la base
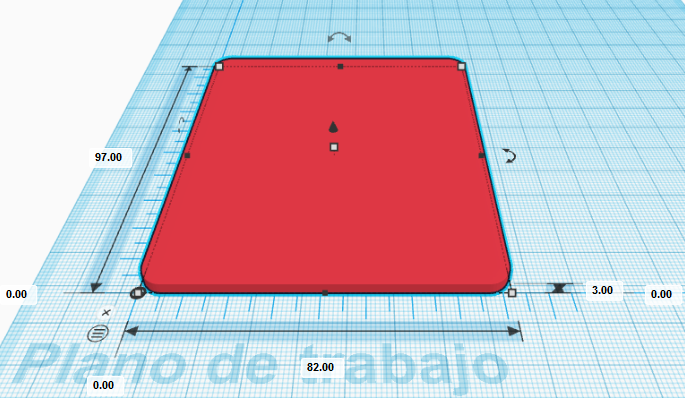
Empezaremos añadiendo una regla a nuestro entorno de trabajo. Colocadla próxima a la esquina inferior izquierda del espacio de trabajo. Después, creamos un cubo de dimensiones (82,97,3) mm y lo posicionamos en la coordenada (0,0,0) mm con respecto de la regla. También modificamos la propiedad «radio» a 1.22 mm para redondear las esquinas de la base (aproximadamente unos 5mm reales de radio de redondeo).
Importar el fichero «Servo.stl» y posicionarlo en la coordenada (0,25.7,-13) mm, girarlo 180º de forma que apunte hacia abajo y establecer que