[:es]En esta entrada se va a explicar el diseño y funcionamiento de un robot DYOR creado para la asignatura de Róbotica Móvil.
Diseño
El diseño de este robot es el DYOR Standard que podéis encontrar en este mismo blog en el apartado de Fabricación, Ensamblajes (Pre-diseñados). En esa sección se puede encontrar no solo el diseño, sino también el montaje del mismo.
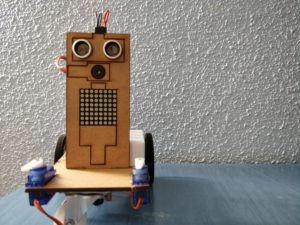
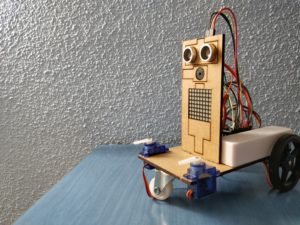
Así es como queda el robot una vez montado.
Componentes
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido KY-006
- Servos SG90 (brazos)
- Servos FS90R (ruedas)
- Módulo Bluetooth HC-05
- Seguilíneas TCRT5000
- Rueda loca
- Matriz de LEDs
Conexiones
A continuación, se explica a qué pines se ha conectado cada componente:
- Ultrasonido HC-SR04: Echo a Pin D4, Trigger a Pin D5
- Zumbador de sonido KY-006: S a Pin D8
- Servos SG90 (brazos): Der a Pin A5 e Izq a Pin A4 (modo digital)
- Servos FS90R (ruedas): Der a Pin A2 e Izq a Pin A3 (modo digital)
- Módulo Bluetooth HC-05: RX a Pin D3, TX a Pin D2
- Seguilíneas TCRT5000: A0 a Pin A0
- Matriz de LEDs: CS a Pin D10, CLK a Pin D11, DIN a Pin D12
Funciones
Este robot tiene programadas 4 funciones diferentes: Control Remoto, Evita Obstáculos, Sigue Líneas y Reproductor de un tono.
Para movernos entre las diferentes funciones del robot se ha creado una aplicación, en mi caso, desde el ordenador con Python y el módulo TKinter. A continuación se muestra el menú principal de esa app:
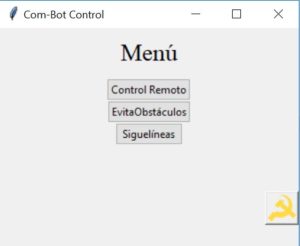
Como se puede observar, podemos seleccionar entre los diversos módulos para acceder a cada una de las funciones. La última función, la de reproducción, se accede desde el botón con el símbolo comunista, porque en mi caso he decidido que se reproduzca el himno de la URSS como explicaré más adelante.
Control Remoto
Como su propio nombre indica, esta aplicación sirve para controlar el robot, en este caso, desde el ordenador. Tiene asignadas unas teclas para llevar a cabo diferentes movimientos, como ir hacia delante o hacia atrás. Desde la aplicación se podrá ver las distintas posibilidades así como su tecla asignada.

Si no pulsamos el botón «Start Communication», no funcionará, y al pulsar «Stop Communication» dejará de funcionar. Esto se hace para que al entrar en otras funciones, no sea posible interferir pulsando las teclas de control del robot.
Durante este proceso, el robot mostrará por la matriz LED la dirección en la que está moviéndose al pulsar cada tecla. Por ejemplo, al pulsar la «w» mostrará una flecha adelante.
Evita Obstáculos
En esta función, el robot se moverá en linea recta hasta que el sonar detecte algún objeto próximo, en cuyo caso el robot se moverá de forma aleatoria a fin de salir del obstáculo y no quedarse atascado en caso de ser una esquina o algo similar. Si el robot es libre de moverse, en la matriz se mostrará un tick, si se detecta un objeto, una señal de STOP.
La aplicación, nos permite simplemente poner en marcha esta función o pausarla.

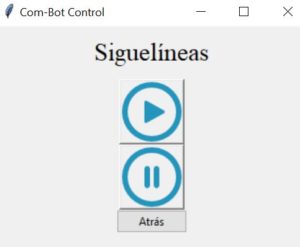
Sigue Líneas
En esta función, el robot se moverá saliendo de la línea negra hacia la derecha y una vez detecte que esta fuera se moverá hacia la izquierda para volver a buscarla. Está es la única forma de hacerlo con un solo sensor de infrarrojos. Sería mucho más sencillo y más eficiente si tuviésemos dos, para así saber por qué lado se ha salido y girar el robot en consecuencia.
Al igual que antes, la aplicación, nos permite simplemente poner en marcha esta función o pausarla.
Reproductor
En esta última función se reproducirá un tono con el zumbador. En mi caso, he seleccionado el himno de la URSS y he incluido en la aplicación algunas imágenes y funcionalidades que le dan el nombre del robot comunista (Com-Bot).
Esta es la pantalla que nos aparece en la app. Si pulsamos la bandera, comenzará a reproducir el himno y mostrar por la matriz LED una hoz y un martillo alternando entre ambos. Si decidimos pulsar el botón «Stop», porque queremos pararlo, nos aparece el siguiente mensaje:
Así que, lo único que podemos hacer es esperar a que el himno acabe para poder continuar usando nuestro robot.
Autor
Nombre: Sergio Latorre Muñoz[:]