[:es]En esta entrada se muestra cómo diseñar el robot DYOR bPED con QCAD paso a paso (se trata de una versión simplificada de las piezas de corte láser del robot DYOR bPED disponibles en la tienda).
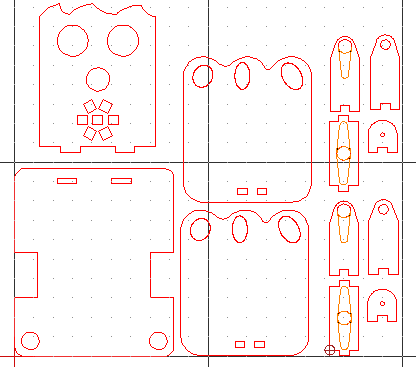
Nuestra propuesta para el diseño del robot DYOR bPED en 2D es como se muestra a continuación:
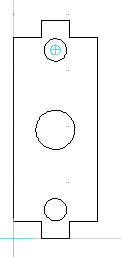
Diseño de la base
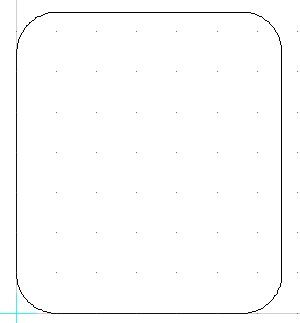
Crea un rectángulo de dimensiones (82,97) mm, posiciona la primera esquina en la coordenada (0,0) mm.
Ahora con la herramienta de redondeo [R,N] con un radio de 5 mm redondeamos las esquinas de la base:
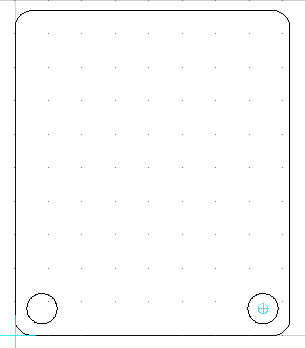
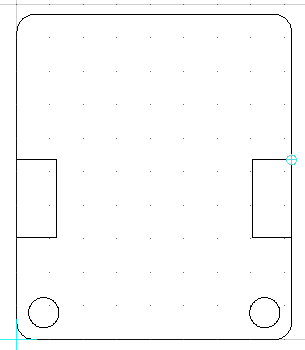
A 8 mm de distancia de los bordes, creamos dos círculos para pasar cables de radio 4.5mm. Los centros de los círculos están en las coordenadas (8,8) y (74,8) mm, respectivamente.
Crea dos rectángulos para los huecos de los servos de las patas. El primer rectángulo tiene como primera coordenada del punto esquina (0,30.4) mm y segunda coordenada del punto esquina (11.8,53.6) mm. El segundo rectángulo tiene como primera coordenada (70.2,30.4) mm y segunda coordenada (82,53.6) mm.
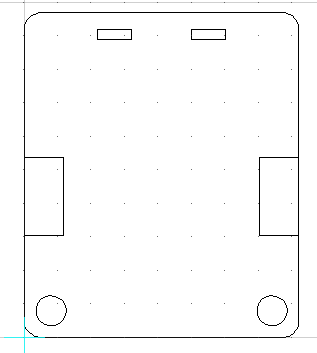
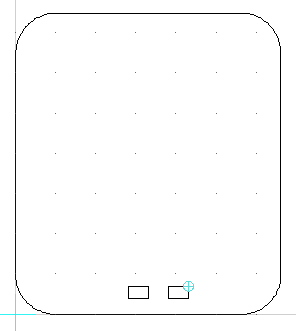
Ahora creamos los orificios para soportar la cara del robot. Los orificios son rectángulos de dimensiones (10,3) mm. El primer rectángulo lo posicionamos en la esquina a (22,89) mm del origen y la segunda esquina está en una posición relativa de @10,3 con respecto a la primera. Para es segundo orificio repetimos el procedimiento, cuya primera esquina está en (50,89) mm respecto del origen.
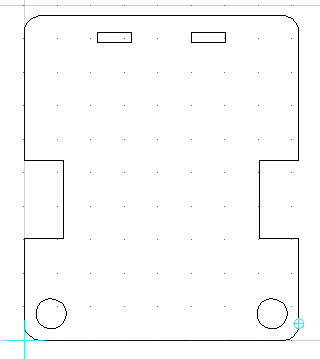
Ahora debemos eliminar las partes que no son necesarias para el corte por láser. Concretamente, eliminaremos los lados exteriores de los huecos de los servos. El objetivo es crear el perfil tal y como se muestra moviendo los puntos extremos de los segmentos tanto de la base como del orificio del servo.
Finalmente pasaremos todos los elementos creados a la capa de corte y uniremos todas las líneas de la periferia, así como las de los orificios para soportar la cara en una única polilínea con el comando [O,G].
Diseño del pie
El diseño de los dos pies es idéntico con lo que proporcionamos las instrucciones para crear un pie (el otro es el espejo vertical).
Crea un nuevo dibujo con un rectángulo de dimensiones (66,75) mm, posiciona la primera esquina en la coordenada (0,0) mm (posteriormente eliminaremos partes de este rectángulo).
Ahora con la herramienta de redondeo [R,N] con un radio de 10 mm redondeamos las esquinas del pie:
Ahora crearemos los orificios para soportar la pieza del tobillo del robot. Son dos cuadrados de dimensiones (5,3) mm. La primera esquina del primer orificio se posiciona en la coordenada (28,4) mm, mientras que la segunda esquina está en la coordenada (33,7) mm. Repetimos el procedimiento para el segundo orificio con las coordenadas (38,4) mm y (43,7) mm, respectivamente.
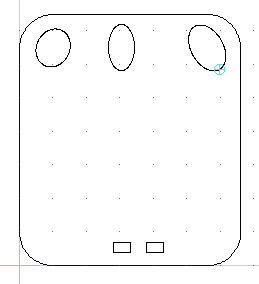
Ahora con la herramienta de crear elipses, procedemos a crear tres elipses en la parte delantera del pie. Su posición y tamaño no son relevantes en tanto en cuanto respeten los criterios necesarios para su fabricación:
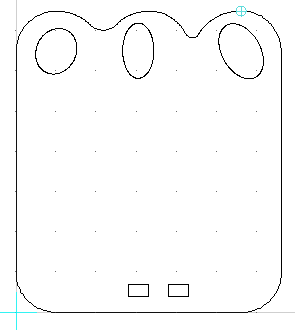
Finalmente, podemos crear segmentos de arco que modifiquen el aspecto de los dedos de los pies. De nuevo, el tamaño y posición no es del todo relevante, pero sí que debemos asegurarnos que entre segmento y segmento de arco, los extremos son coincidentes, con lo que lo más sencillo es utilizar la opción de crear segmentos de arco a partir de tres puntos, en el que podemos sencillamente especificar el punto inicial, un punto intermedio y un punto final.
Ahora podemos pasar todos los elementos a la capa de corte. Recordad que podéis unir todos los segmentos de línea y círculo con el comando Crear a partir de segmentos [O,G].
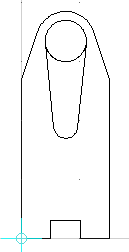
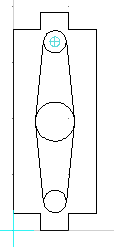
Diseño de la pierna
La pierna está compuesta por tres piezas: la parte delantera a la que se atornillará la manilla del servo del pie, la parte trasera en contacto con la pieza del tobillo y que acomodará un rodamiento y la parte superior a la que se atornillará la manilla del servo de la pierna. Las tres piezas forman una «U» que envuelven al servo del pie una vez ensambladas.
Parte delantera
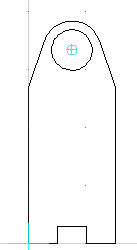
Primero creamos una polilínea con las siguientes coordenadas:
0,27 @0,-27 @5,0 @0,3 @5,0 @0,-3 @5,0 @0,27
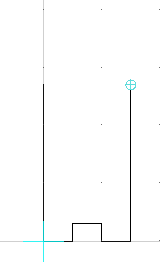
Ahora creamos un círculo de radio 5mm con centro (7.5,33.5) mm:
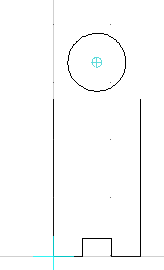
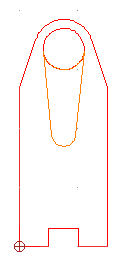
Ahora creamos dos rectas tangentes al círculo cuyo punto inicial es cada uno de los extremos de la polilínea:
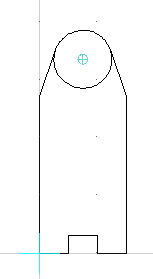
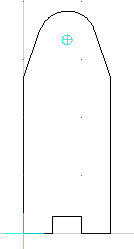
Para eliminar la parte del círculo que no pertenece a la periferia, utilizamos la herramienta Partir [D,I], seleccionamos el círculo y buscamos los puntos de intersección. Una vez partido el círculo, podemos proceder a eliminar el arco sobrante.
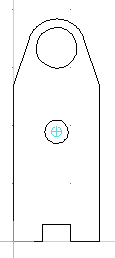
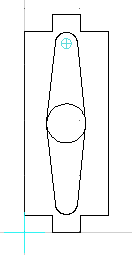
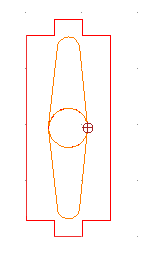
Ahora creamos un círculo de radio 3.5 mm con centro (7.5,33.5) mm.
y otro círculo más pequeño de radio 2 mm con centro (7.5,19) mm.
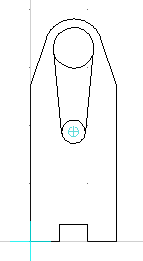
Para generar la forma de la manilla del servo, crearemos dos rectas tangentes a los círculos.
Ahora crearemos un segmento de círculo con radio 3.5 mm y puntos extremos en las intersecciones de las rectas recién creadas. Este segmento de círculo aparece seleccionado para resaltarlo en la imagen.
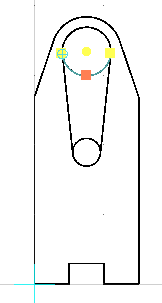
Finalmente, partimos el círculo pequeño en dos por los puntos de tangencia con el comando Partir [D,I].
Ahora, es conveniente mover los objetos de la periferia a la capa de corte y los elementos de la manilla del servo (incluyendo el segmento de círculo creado a la capa de grabado superficial).
Recordad que podéis unir todos los segmentos de línea y círculo con el comando Crear a partir de segmentos [O,G].
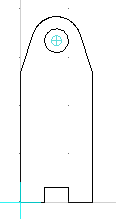
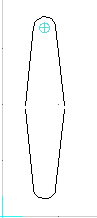
Parte trasera
A partir del diseño anterior, ahora debemos primero eliminar los elementos internos y crear un círculo con centro (7.5,33.5) mm y radio 2.45 mm para el rodamiento. Pasamos todos los objetos a la capa de corte y creamos todos los segmentos de línea y círculo como una única polilínea.
Parte superior
Creamos una polilínea con los siguientes comandos:
0,3 @5,0 @0,-3 @5,0 @0,3 @5,0 @0,33 @-5,0 @0,3 @-5,0 @0,-3 @-5,0 @0,-33
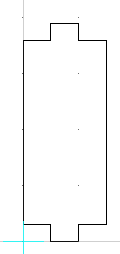
Ahora creamos tres círculos: el primero con centro (7.5,19.5) mm y radio 3.5 mm; el segundo con centro (7.5,5.2) mm y radio 2 mm y el tercero con centro (7.5,33.8) mm y radio 2 mm.
Ahora creamos cuatro segmentos de línea tangentes a los círculos tal y como se muestra:
Ahora partiremos (con el comando Partir [D,I]) en los círculos pequeños en los puntos de tangencia y eliminaremos el segmento de círculo sobrante. Recordad que en el punto de división, debemos colocar el cursor en el punto que detecta como «intersección».
Ahora, para evitar confundirnos, lo más sencillo es pasar la polilínea y el círculo central a la capa de corte y ocultar temporalmente esta capa.
Creamos otro círculo con centro (7.5,19.5) mm y radio 3.5 mm al igual que antes y partimos el círculo en cuatro partes en los puntos de tangencia con las rectas y eliminamos la parte sobrante de los laterales y pasamos todos los elementos a la capa de grabado superficial. El resultado final uniendo las polilíneas con el comando Crear a partir de segmentos [O,G] es como el que se muestra:
Diseño del tobillo
El tobillo es simplemente una pieza de soporte en la que se inserta un remache que atravesará el rodamiento que está colocado en la pieza de la pierna de la parte trasera. Primero empezaremos creando una polilínea con los siguientes comandos:
0,9.3 @0,-9.3 @5,0 @0,3 @5,0 @0,-3 @5,0 @0,9.3
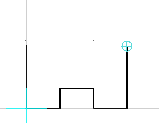
Ahora creamos un segmento de círculo a partir del radio (7.5 mm) y dos puntos (los extremos de la polilínea).
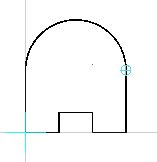
Finalmente crearemos un círculo de radio 1 mm y centro (7.5,9.3) mm.
Ahora podemos pasar todos los elementos a la capa de corte. Recordad que podéis unir todos los segmentos de línea y círculo con el comando Crear a partir de segmentos [O,G].
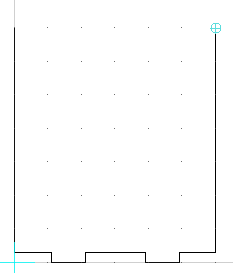
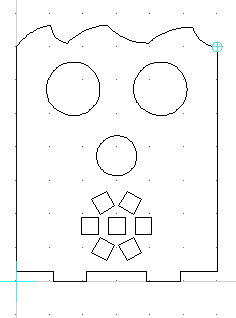
Diseño de la cara
Empezamos creando una polilínea:
0,70 @0,-67 @11,0 @0,-3 @10,0 @0,3 @18,0 @0,-3 @10,0 @0,3 @11,0 @0,67
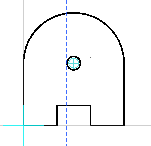
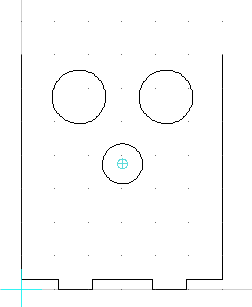
Los orificios para el sensor de ultrasonidos son dos círculos de radio 8 mm, cuyos centros son (17,57.5) mm y (43,57.5) mm, respectivamente. Por otro lado, el orificio para el zumbador es un círculo de radio 6 mm con centro (30,37.5) mm.
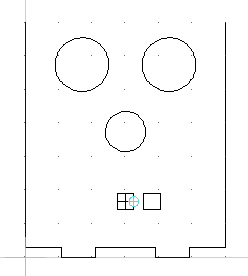
Para los orificios de la tira de leds con forma redonda que hace de «boca» crearemos un cuadrado de 5×5 mm (para el led central). La primer esquina del cuadrado del LED del centro está en la coordenada (27.5,14.1) mm, mientras que la segunda esquina está en la coordenada (32.5,19.1) mm. Luego, seleccionamos el cuadrado recién creado y realizamos una copia [M,V] e introducimos como punto de referencia cualquier esquina del cuadrado y como punto objetivo @8,0, es decir, el cuadrado estará desplazado 8 mm a la derecha (aseguraros que al hacer la copia no borráis el elemento original). Para poder ahora hacer copias giradas de este nuevo cuadrado, primero crearemos una línea auxiliar entre los puntos medios del cuadrado central (tanto horizontal como vertical), ya que el objetivo es utilizar el punto de intersección como punto pivote.
Ahora estamos en disposición de seleccionar el cuadrado de la derecha y realizar una copia múltiple girada 60º. Con el cuadrado seleccionado introducimos el comando de rotar [R,O] y marcamos como punto central el punto de intersección del cuadrado central y marcamos la opción de copia múltiple con 5 copias giradas 60º. Ahora ya podemos eliminar las líneas auxiliares que hemos creado en el cuadrado central
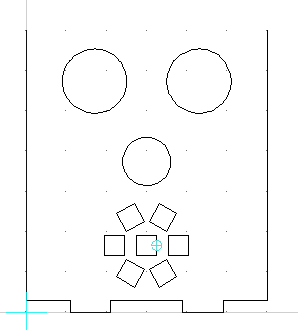
Para finalizar, podemos dibujar de forma sencilla un pelo de forma que, al igual que se ha hecho con los pies, el objetivo es dibujar segmentos de círculo conexos a partir de sus puntos.
Ahora podemos pasar todos los elementos a la capa de corte. Recordad que podéis unir todos los segmentos de línea y círculo con el comando Crear a partir de segmentos [O,G].
Nota
En la versión básica del robot bPED, la tira de 7 LEDs redonda no se incluye porque este robot está pensado en se controlado directamente desde Arduino Nano que trabaja a 5V, mientras que el robot bPED (completo) utiliza el procesador ESP32 que trabaja a 3.3v, aptos para la tira de LEDs.
El diseño de la versión básica es por tanto muy similar al de la versión completa con la principal diferencia que en la versión básica la cara es 29.8mm más pequeña. La base del robot también es 21 mm más pequeña (de largo), ya que no necesita tampoco acomodar un powerbank, si no que utiliza una batería de 9V en su lugar.[:en]In this entry, we show how to design DYOR bPED with QCAD step by step (this is a complete version of it).
Our proposal for the design of DYOR in 2D is shown here:
Base design
Create a rectangle of dimensions (82,97) mm, place the first corner at position (0,0) mm.
Now, with the rounding too [R,N] with a radius of 5 mm round the corners of the base:
Starting 8 mm of distance from the sides, we can create two circles to pass through the servo cables with radius 4.5mm. The centres of the circles are actually in coordinates (8,8) and (74,8) mm, respectively.
Create two rectangles for the leg servos. The first rectangle has, as first coordinate the corner at (0,30.4) mm and the second corner coordinate at (11.8,53.6) mm. The second rectangle has as first coordinate the point (70.2,30.4) mm and as the second coordinate (82,53.6) mm.
Now, we create holes for robot’s face. The first rectangle is placed at corner (22,89) mm from the origin and the second corner is placed at a relative position @10,3 mm from the first corner. For the second hole, we repeat the procedures, but now the first corner is placed at (50,89) mm from the origin.
Now, we should remove unnecessary parts for laser cutting. In particular, we will remove the lines of the servos in coincident with the robot’s base. So the actual design should be as shown:
Finally, we will set all created objects to belong to the «Cut» layer and join them to create a single polyline with command [O,G].
Foot design
The foot design is same for both feet and a vertical mirroring is required once one of them is created to create the other one.
On a new drawing, create a rectangle of dimensions (66,75) mm, place the first corner at coordinate (0,0) mm (some parts of this rectangle will be removed later on).
Now, with the rounding tool [R,N] with a radius of 10 mm we will round the corners of the foot:
Now, we will create holes to insert the ankle part of the robot. They are two rectangles of dimensions (5,3) mm. The first corner of the first hole is placed at coordinate (28,4) mm, while the second corner is at coordinate (33,7) mm. Repeat the process for the second hole with coordinates (38,4) mm and (43,7) mm, respectively.
Now, with the ellipsis tool, we can create three ellipses at the front of the foot, to represent the toe’s nails. Their position and size are not relevant as long as they satisfy minimum manufacturing constraints:
Finally, with the arc segment tool, we can create the toes. Again the position and size are not relevant, but we must concatenate arc segment ends, so the end point of one must be the starting point of the next one. The easiest way is to use the option to create the arc segment by specifying three points.
Now, we can move all elements to the «Cut» layer and join them to create a single polyline using the command [O,G].
Leg Design
The leg is composed of three parts: the front part, fixed to the feet servo; the rear one, in contact with the ankle part and the top one attached to the servo leg. All three parts must create a «U» once assembled.
Let’s first create a polyline with the following coordinates:
0,27 @0,-27 @5,0 @0,3 @5,0 @0,-3 @5,0 @0,27
Now, let’s create a circle with radius 5mm and centre (7.5,33.5) mm:
Now, we will create tangent lines to the circle with initial points the ends of the polyline:
To remove the part of the circle not belonging to the periphery, we can use the Divide tool [D,I], select the circle and the intersection points. Once the circle is divided, we can remove the arc segment we are not interested in.
Now, we can create a circle with radius 3.5 mm and centre (7.5,33.5) mm.
and another smaller circle with radius 2 mm and centre (7.5,19) mm.
To generate the servo horn, we can create tangent lines to both circles.
Now, we will create an arc segment with radius 3.5 mm and end points coincident with ends of the two recently created lines. This arc segment appears selected in the image.
Finally, we can divide the smaller circle into to at the tangent points as before with the Divide tool [D,I].
Now it is convenient to move the periphery objects as well as the big circle to the «Cut» layer and the objects corresponding to the servo horn to the «Engraving» layer.
As a reminder, you can join all objects with the command [O,G].
Rear Leg
Based on the previous design, we can remove the inner objects and create a circle with centre (7.5,33.5) mm and radius 2.45 mm for the ball bearing. All elements must be moved to the «Cut» layer as a single polyline.
Top Leg
Create a polyline with the following commands:
0,3 @5,0 @0,-3 @5,0 @0,3 @5,0 @0,33 @-5,0 @0,3 @-5,0 @0,-3 @-5,0 @0,-33
Now, we create three circles with centers and radius as indicated:
- First circle: Center (7.5,19.5) mm and radius 3.5 mm.
- Second circle: Center (7.5,5.2) mm and radius 2 mm.
- Third circle: Center (7.5,33.8) mm and radius 2 mm.
Now we create four line segments tangent to the circles as shown:
Now, let’s divide (with command [D,I]) the circles into two at tangent points and remove the reminder arc segment. To make sure that the dividing point is the correct, it should be indicated as «intersection» when placing the cursor over it.
Now, to avoid getting confused, it’s better to move the polyline and the central circle to the cutting layer, which will be temporarily hidden.
Create another circle with centre (7.5,19.5) mm and radius 3.5 mm and as before, we divide the circle into four segments with at the contact points with the lines and remove the reminder segment at the sides and move them to the «Engraving» layer. The expected result is shown below (remember to join all polylines):
Ankle Design
The ankle is a part with a small hole for a rivet passing through the ball bearing (inserted in the rear leg part). Let’s first start with a polyline with the following commands:
0,9.3 @0,-9.3 @5,0 @0,3 @5,0 @0,-3 @5,0 @0,9.3
Now, let’s create an arc segment with radius 7.5 mm and end-points the ends of the polyline.
Finally, we will create a circle with radius 1 mm and centre (7.5,9.3) mm.
Now, we can move all objects to the «Cut» layer and join them to form a single polyline with command [O,G].
Face Design
Let’s start by creating a polyline:
0,70 @0,-67 @11,0 @0,-3 @10,0 @0,3 @18,0 @0,-3 @10,0 @0,3 @11,0 @0,67
Holes for the sonar sensor are circles of radius 8 mm, with centres (17,57.5) mm and (43,57.5) mm, respectively. On the other hand, the hole for the buzzer is a circle with radius 6 mm with centre (30,37.5) mm.
For the holes corresponding to the LED strip with 7-LEDs, the «mouth», we will start by creating a square with 5×5 mm dimensions (corresponding to the LED in the centre position). The first corner of the square is the coordinate (27.5,14.1) mm, while the second corner with (32.5,19.1) mm. Select the square and create a copy of it [M,V] and introduce as the reference point any corner of the square and as a target point @8,0, that is, the new square will be placed 8 mm to the right (make sure you don’t delete the original during copying). In order to create rotated copies, we will first create an auxiliary line between the middle points of the central square (so that we can choose later on the middle point as a pivoting point.
Now, we can select the square to the right and create 5 copies rotated 60º with the command [R,O] and selecting as pivoting point the intersecting point of auxiliary lines. After that, we can remove auxiliary lines.
Now, we can draw the hair, in a similar way we did the toes, by drawing connected arc segments.
Now, we can move all object to the «Cut» layer and join the elements with the command [O,G].
Note
In the basic version of bPED, the LED strip is not created because this LED strip only works with 3.3V.
The basic design is therefore very similar without the LED strip and the Powerbank (replaced with a 9V battery holder to reduce price). As a consequence, the face is 29.8mm shorter and the robot base is 21mm smaller.[:]