[:es]En esta entrada se muestra cómo diseñar el robot DYOR (versión básica) con TinkerCAD paso a paso.
Nuestra propuesta para el diseño del robot DYOR Básico en 3D es como se muestra a continuación, que está específicamente adaptada para la impresión 3D:
Para el diseño del robot utilizaremos los siguientes ficheros STL:
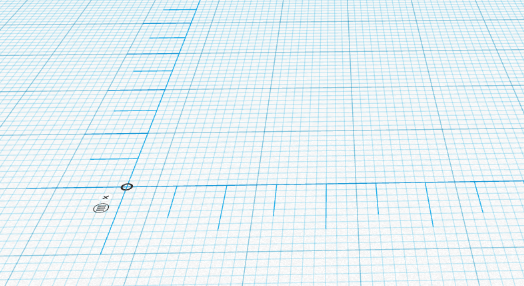
Comenzaremos arrastrando la regla a nuestro plano de trabajo (preferiblemente cerca de la esquina inferior izquierda).
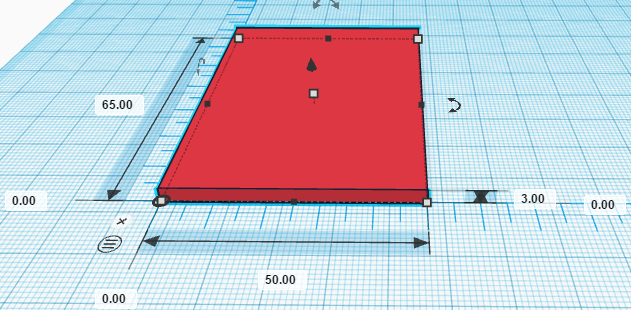
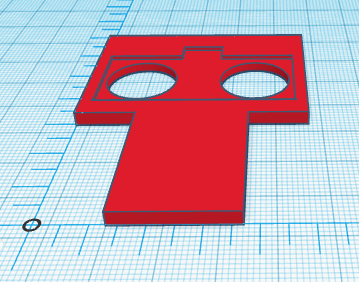
Ahora creamos un cubo (frontal del robot) y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimensiones (50,65,3), largo, ancho y alto, respectivamente.
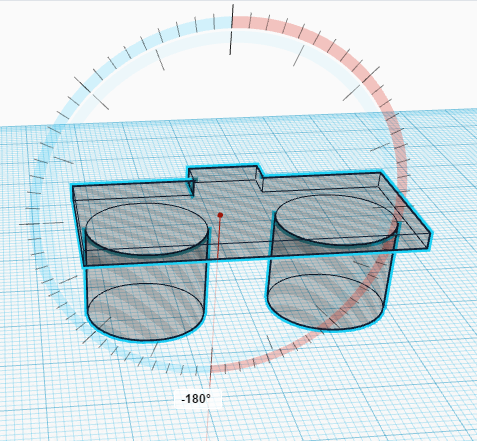
Importar el fichero «HC-SR04.stl», posicionarlo en cualquier lugar, girarlo 180º con respecto a la cara frontal y hacerlo hueco.
Ahora lo posicionamos en la coordenada (2.5,34.5,-11) y lo agrupamos al frontal del robot.

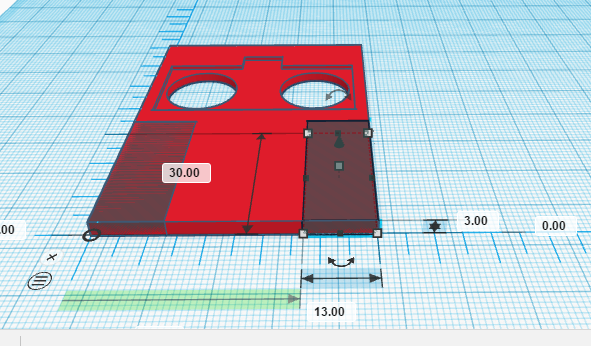
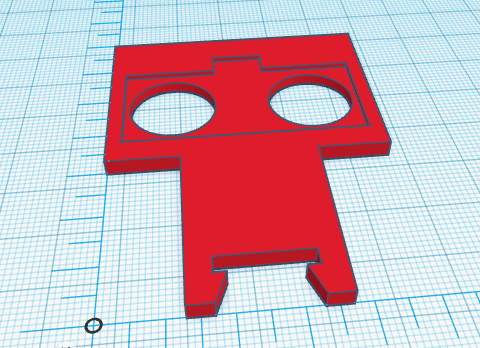
Ahora crearemos dos cubos huecos para eliminar parte de los laterales inferiores del frontal del robot. Las dimensiones son (13,30,3) y las posiciones son (0,0,0) y (40,0,0). Una vez creados los unimos con el resto de las piezas.

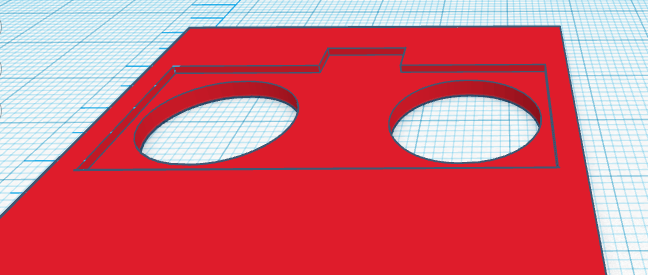
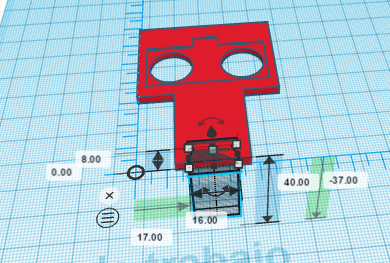
Finalmente, para terminar con la parte del frontal del robot, importamos el fichero «TCRT5000.stl», lo hacemos hueco y lo posicionamos en la coordenada (17,0,-37) y lo agrupamos con el resto de la pieza.
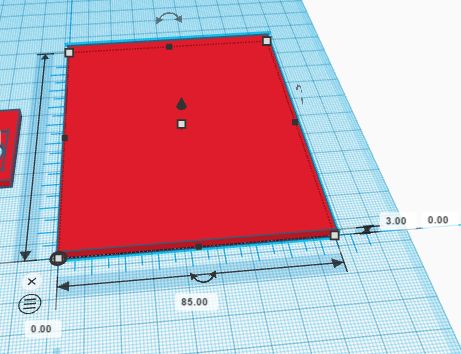
Para realizar la base del robot, moveremos la regla a un lugar donde tengamos espacio libre. Crear un cubo de dimensiones (85,105,3) y posicionarlo en la coordenada (0,0,0).
Ahora creamos el orificio para que pase el frontal del robot. Se trata de un cubo de dimensiones (24,3,3) y lo posicionamos en la coordenada (30.5,98,0) y lo hacemos hueco:

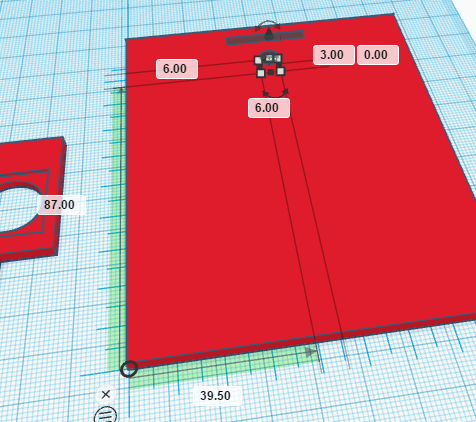
Finalmente, crearemos un orificio para que pasen cables a la parte inferior de la base. Se trata de un cilindro hueco de dimensiones (6,6,3), posicionado en la coordenada (39.5,87,0):
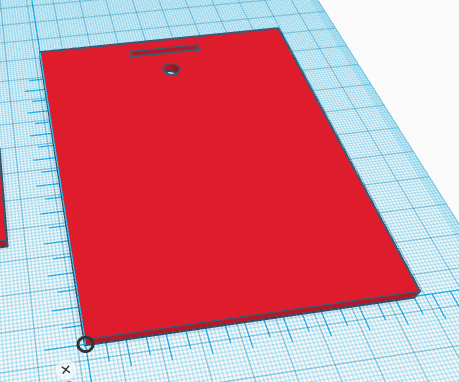
Agrupdad las tres formas, la base, el orificio para el frontal y el orificio para los cables. El resultado esperado es este:
Aquí podéis descargar el fichero STL con la solución:
 [:en]En esta entrada se muestra cómo diseñar el robot DYOR (versión básica) con TinkerCAD paso a paso.
[:en]En esta entrada se muestra cómo diseñar el robot DYOR (versión básica) con TinkerCAD paso a paso.
Nuestra propuesta para el diseño del robot DYOR Básico en 3D es como se muestra a continuación, que está específicamente adaptada para la impresión 3D:
Para el diseño del robot utilizaremos los siguientes ficheros STL:
Comenzaremos arrastrando la regla a nuestro plano de trabajo (preferiblemente cerca de la esquina inferior izquierda).
Ahora creamos un cubo (frontal del robot) y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimensiones (50,65,3), largo, ancho y alto, respectivamente.
Importar el fichero «HC-SR04.stl», posicionarlo en cualquier lugar, girarlo 180º con respecto a la cara frontal y hacerlo hueco.
Ahora lo posicionamos en la coordenada (2.5,34.5,-11) y lo agrupamos al frontal del robot.
Ahora crearemos dos cubos huecos para eliminar parte de los laterales inferiores del frontal del robot. Las dimensiones son (13,30,3) y las posiciones son (0,0,0) y (40,0,0). Una vez creados los unimos con el resto de las piezas.
Finalmente, para terminar con la parte del frontal del robot, importamos el fichero «TCRT5000.stl», lo hacemos hueco y lo posicionamos en la coordenada (17,0,-37) y lo agrupamos con el resto de la pieza.
Para realizar la base del robot, moveremos la regla a un lugar donde tengamos espacio libre. Crear un cubo de dimensiones (85,105,3) y posicionarlo en la coordenada (0,0,0).
Ahora creamos el orificio para que pase el frontal del robot. Se trata de un cubo de dimensiones (24,3,3) y lo posicionamos en la coordenada (30.5,98,0) y lo hacemos hueco:
Finalmente, crearemos un orificio para que pasen cables a la parte inferior de la base. Se trata de un cilindro hueco de dimensiones (6,6,3), posicionado en la coordenada (39.5,87,0):
Agrupdad las tres formas, la base, el orificio para el frontal y el orificio para los cables. El resultado esperado es este:
Aquí podéis descargar el fichero STL con la solución:
[:]