[:es]En esta entrada se presenta a nuestro compañero Antonio el Calavero, desde su historia, pasando por su diseño, montaje y programación.
SU HISTORIA Y DISEÑO
Antonio es un robot DYOR que partió de una idea bastante difusa de lo que iba a ser hasta convertirse en Antonio el Calavero.
En un principio se pensó en un robot que pudiera abrir botellines de cerveza, pero debido a su pequeño tamaño y a la poca fuerza que podían ejercer sus servos se descartó la idea.
Como se suele decir, el tamaño no importa, pero para Antonio si era importante ya que el botellín más pequeño mide unos 20 cm mientras que nuestro amigo tiene una altura de unos 13 cm. Esta altura es hasta su cabeza, pero esta claro que no íbamos a abrir los botellines con la cabeza, si no con los servos, que están situados a 5 cm aproximadamente (midiendo desde el suelo).
El tamaño era un problema, pero también lo era la fuerza. Como bien es dicho por nuestros abuelos y padres: «más vale maña que fuerza», pues Antonio no se si tenia maña, pero fuerza… fuerza no tenía, así que finalmente tras estos inconvenientes Antonio volvió a ser un lienzo en blanco.
Tras unos días pensando qué hacer y qué funciones podía hacer Antonio, surgió la idea de hacer una especie de robot DJ/Pianista, ya que a mi, personalmente, me encanta la música. Así que abrí el SolidWorks (programa de diseño en 3D) y me puse manos a la obra.
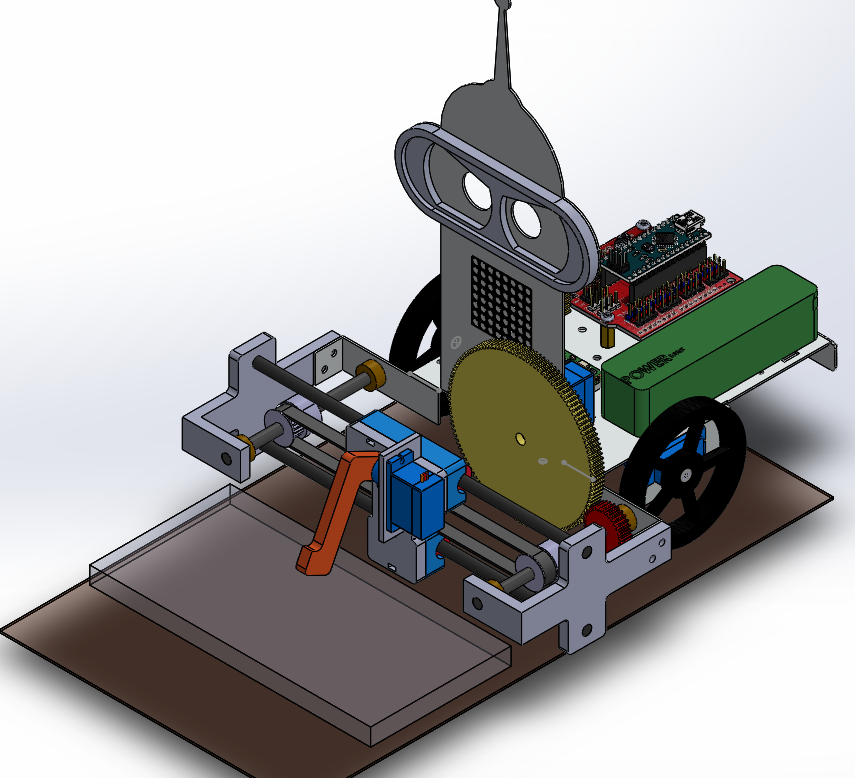
Como primer apunte, tiene el parecido de Bender, el robot de la serie de dibujos ‘Futurama’, ya que al venir de un robot abre-cervezas me gustó la idea, así que se le quedó esa «skin».
El funcionamiento principal de este robot era mover la figura naranja de izquierda a derecha y viceversa mediante el servo situado detrás del engranaje amarillo. Este servo, al girar, giraba solidariamente con el engranaje amarillo que a su vez giraba el engranaje rojo. El engranaje rojo es solidario a través de un eje con el engranaje por el que pasa la correa y esta correa movía la deslizadera azul del medio.
En la deslizadera tenemos otro servo que sirve para bajar y subir la pieza naranja que tocaría la pantalla de nuestro móvil o tableta tocando las teclas de un piano etc.
Esta idea no se pudo llevar a cabo debido a problemas con el corte con láser del chasis.
Cómo os podéis imaginar, cuando se me informó del problema con el corte y tras haber invertido todas esas horas de diseño, las ganas que tenía de seguir con otro nuevo robot no eran demasiado grandes, pero no había otra.
Tras los problemas de corte por láser, nuestro profesor, mandó un diseño básico del chasis según la electrónica que le queríamos poner a nuestro robot, junto con brazos, soportes etc.
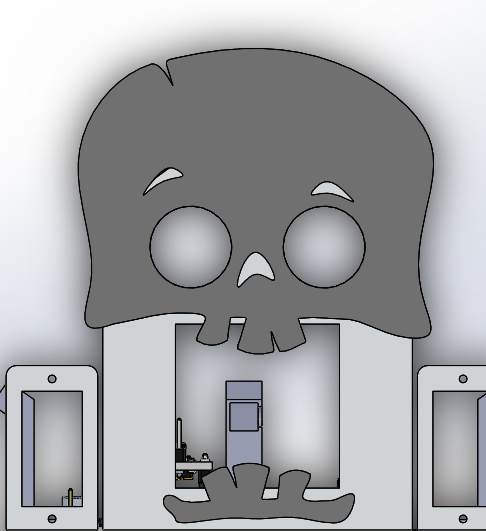
Tras recibir el chasis de aluminio ya cortado junto con las otras piezas, me puse a doblarlas y no se cómo, al ver los brazos que irían en los servos se me asemejaron a las manos de una calavera.
Entré en el SolidWorks y tras mirar algunos dibujos de calaveras por Internet me puse a dibujarla y diseñarla en 3D para que no todos nuestros robots fueran iguales.
Este fué el nacimiento de Antonio el Calavero.
EL MONTAJE
El montaje del robot puede ser muy sencillo si eres ordenado y estás concentrado en lo que estás haciendo, de lo contrario es muy probable que te equivoques en la posición de algunos de los pines y puedas quemar o dañar algún que otro componente. No serás ni el primero ni el último que quema una placa de Arduino o algún que otro LED.
Los elementos que he utilizado para construir a Antonio son los siguientes:
- Placa de Arduino Nano (compatible).
- Cable USB.
- Placa extensora del Arduino Nano (placa roja).
- 3 tornillos de plástico negros con sus correspondientes tuercas y espaciadores.
- Batería de 5 V.
- Matriz de LED’s de 8×8.
- Sensor de ultrasonidos HC-SR04.
- Módulo Bluetooth HC-06.
- Buzzer.
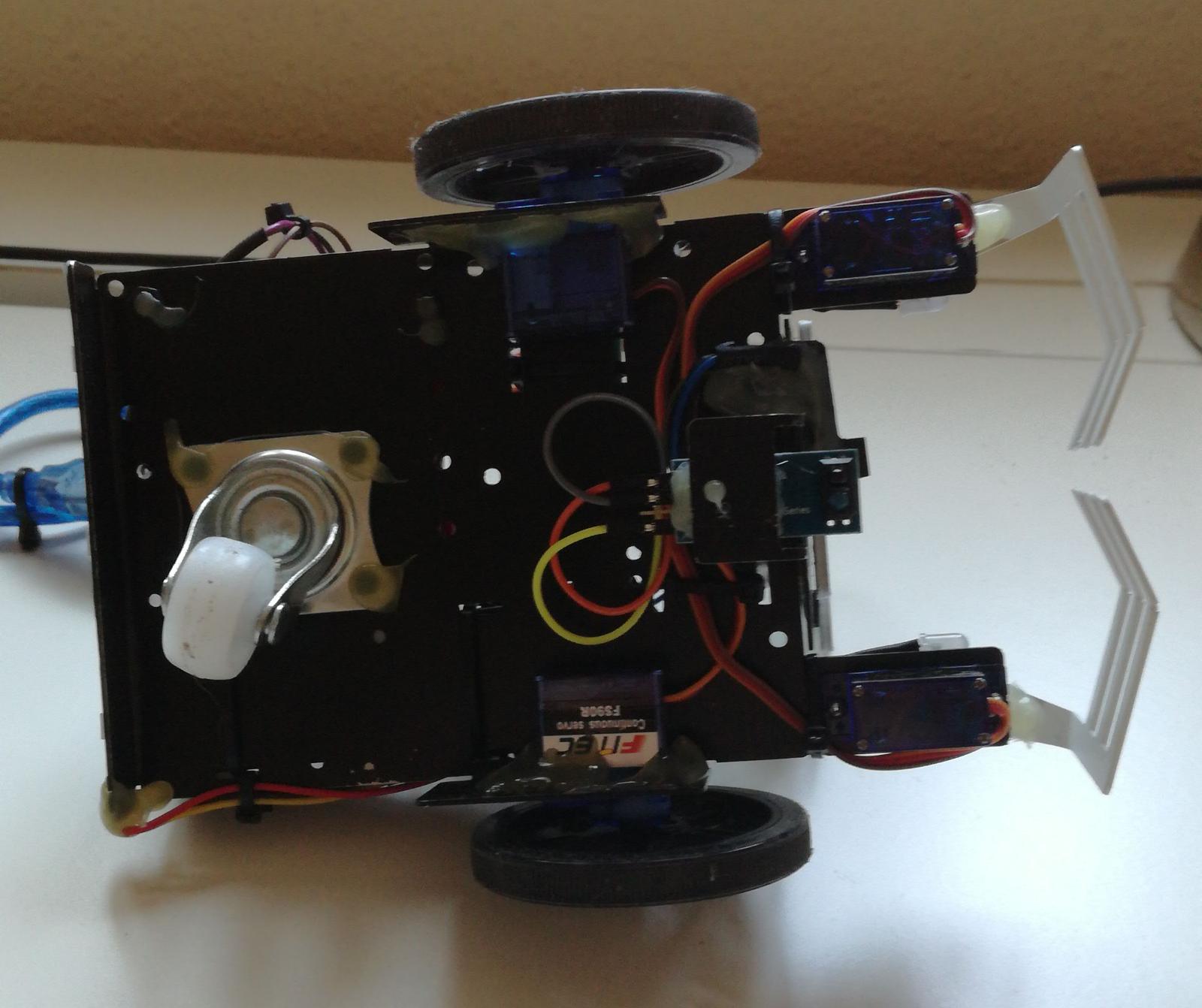
- 2 servos FS90R para las ruedas (vienen con ruedas, tornillos y otros accesorios).
- 2 servos SG90 (de 180º) para los brazos (al igual que los otros servos, también llevan accesorios y tornillos).
- Tira LED RGB de 3 leds.
- 2 LED’s blancos para las luces delanteras.
- Sensor infrarrojo TCRT5000.
- Soporte de aluminio para el infrarrojo.
- 1 rueda loca.
- 38 cables hembra-hembra, recomiendo comprar de más por si acaso.
- 4 resistencias LDR’s.
- 1 chasis de aluminio.
- 2 brazos de aluminio.
- 4 soportes para las LDR’s de impresión en 3D.
- Estaño.
- Soldador (de estaño obviamente ;)).
- Tubos termorretráctiles (unos cuantos, más vale que sobre que que falte).
- Barras de plástico termofusible (con esto lo vas a pegar casi todo).
- Pistola de termofusible.
- Destornillador.
- Bridas (también unas cuantas).
- Pela-cables.
- Tijeras.
- 4 resistencias de 1000 ohmios.
- 5 resistencias de 470 ohmios.
- La calavera de impresión en 3D.
- La mandíbula de impresión en 3D.
- Programa para programar la placa de Arduino Nano.
- Muchas ganas, paciencia y algún que otro insulto (pero siempre con amor).
Tras haber doblado el chasis de aluminio con la ayuda de lo que yo le llamo un buen masajeador de metales, un martillo, lo primero que hice fue pintarlo de negro mate (el color da igual, para gustos colores, también era el pote de spray que tenía por casa :D) para aislar eléctricamente el chasis del resto de los elementos, aunque solo sea un poco.
En segundo lugar, probé por separado todos los elementos que iba a usar para saber si funcionaban correctamente y saber claramente como se controlaban. Como tengas todo montado y te falle y no sepas el motivo, puede ser una fiesta, más vale ir poco a poco. Como se suele decir, vísteme despacio que tengo prisa. No seáis unos ansias!!!
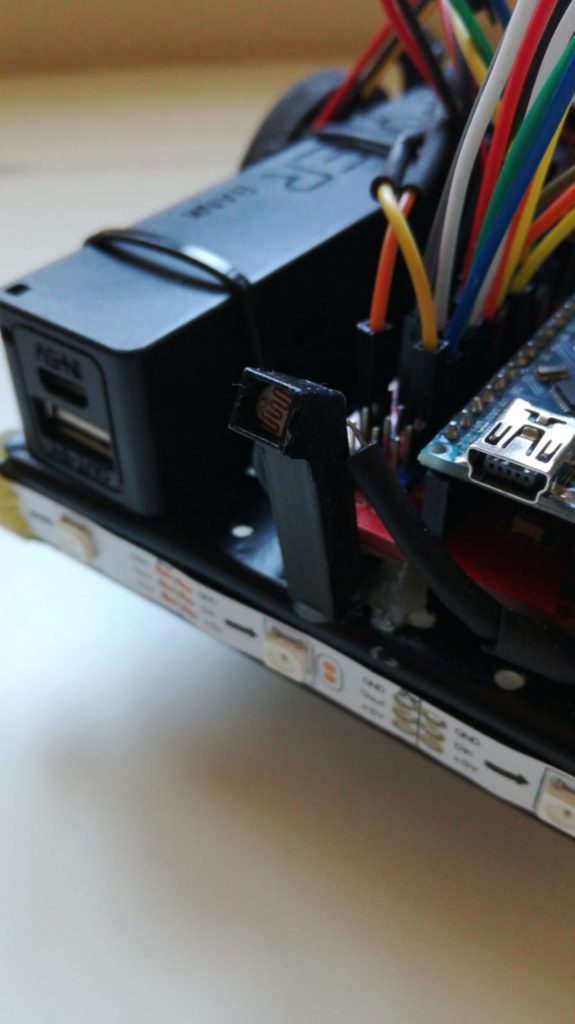
(Recomiendo que los pines de los módulos como el bluetooth, infrarrojos u otros les pongáis termofusible para que no puedan cruzarse entre ellos y dañar la placa o el propio módulo.)
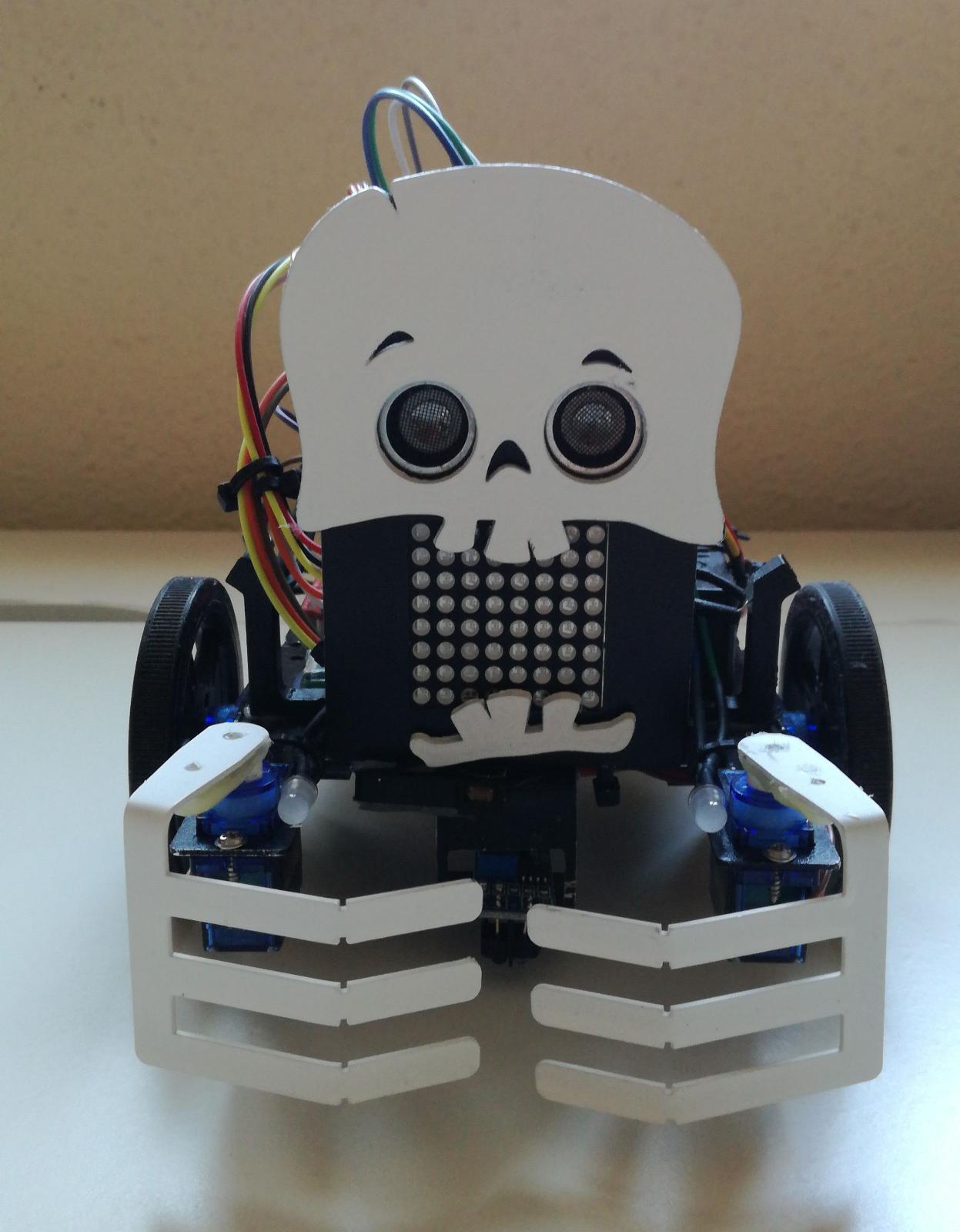
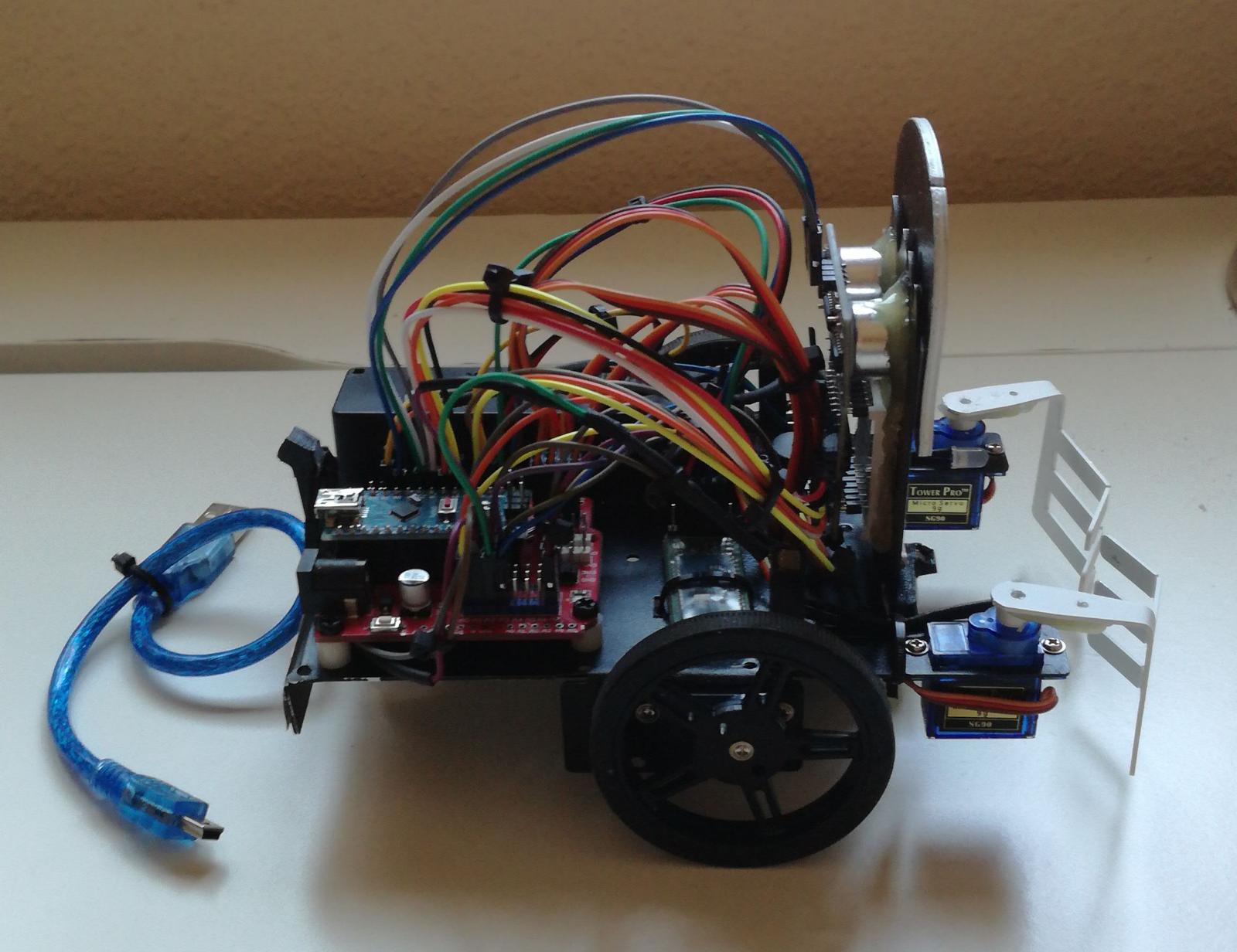
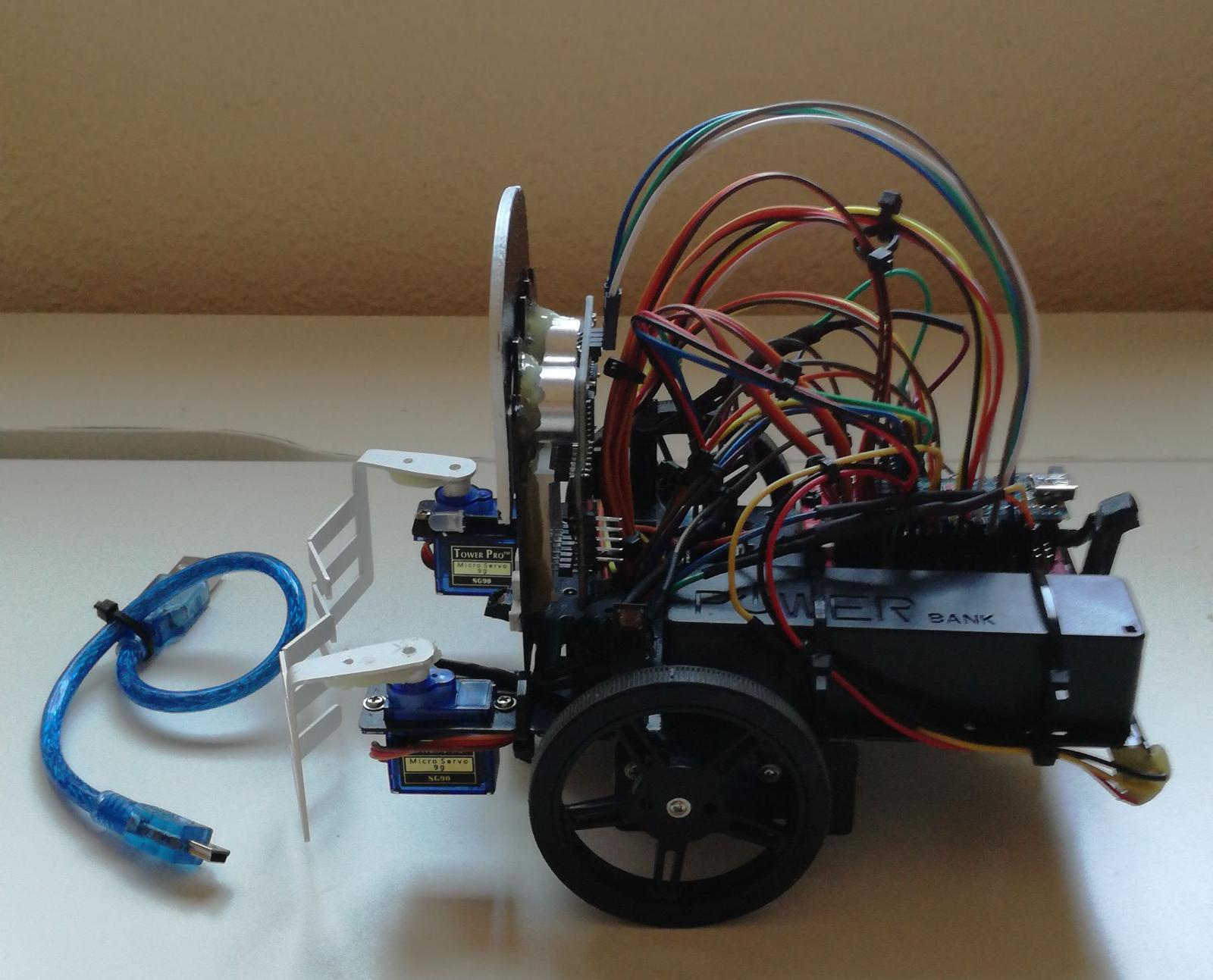
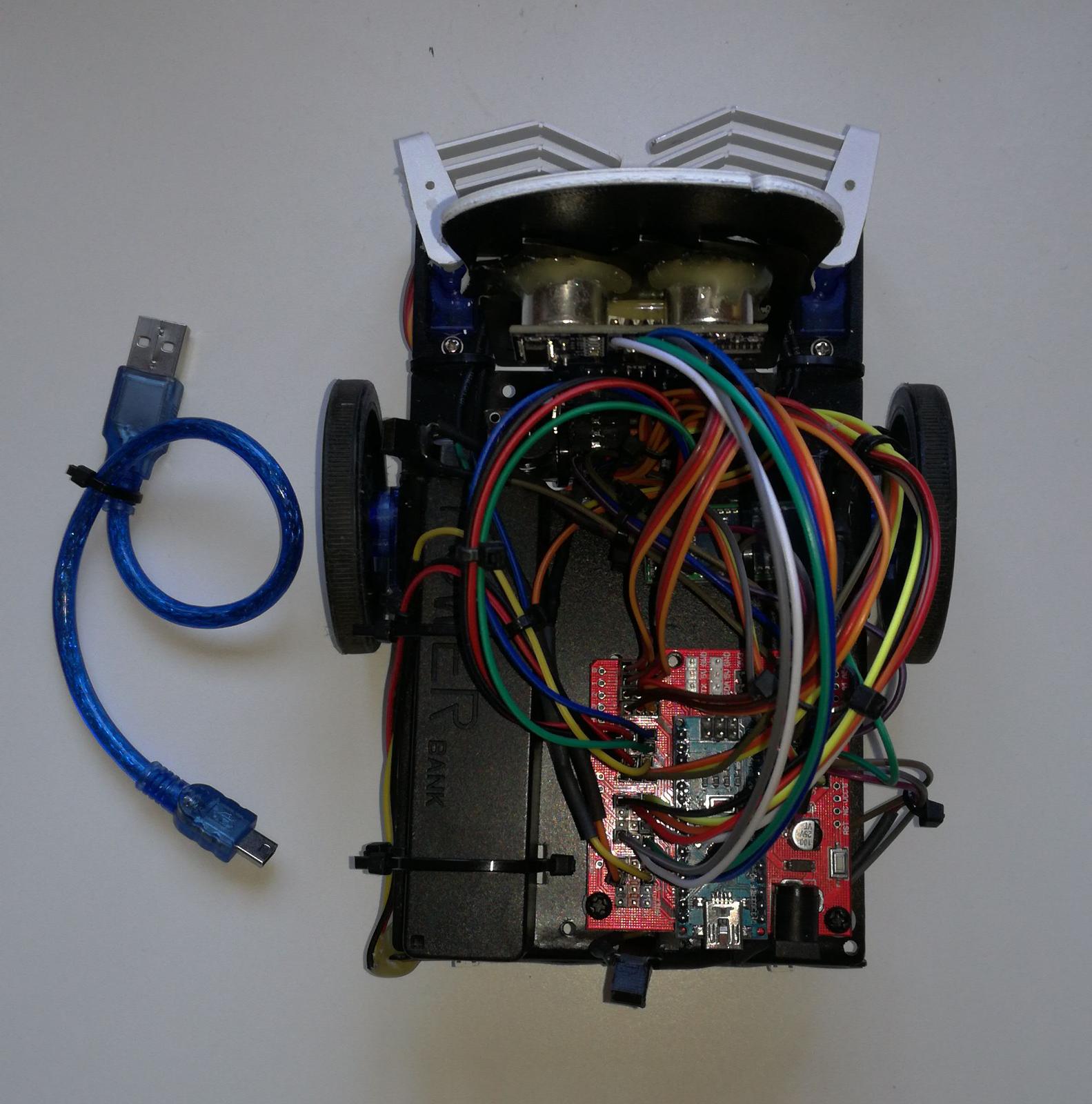
Una vez todo montado os debe quedar algo así, os presento a Antonio en todo su esplendor:
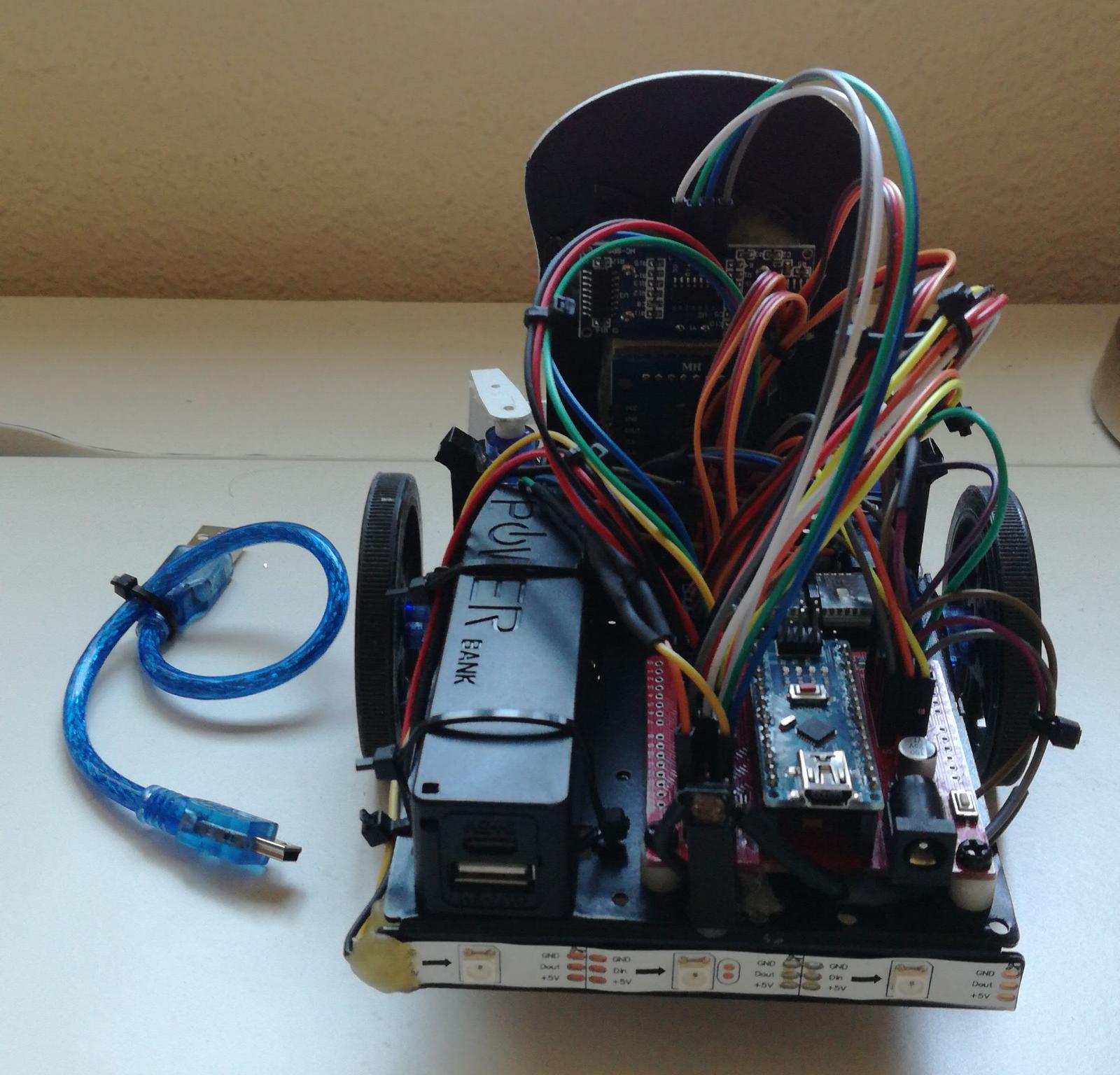
SU PROGRAMACIÓN
Respecto a su programación, todo el robot está gobernado a través del módulo bluetooth situado en el medio de él.

A través de este módulo y con la ayuda de una aplicación creada con AppInventor2, conseguimos que nuestro amigo haga lo que le hemos programado en su diminuto «cerebro».
Antonio está programado para tener 4 modos:
- Modo Manual.
- Modo Seguilíneas.
- Modo ve a la luz.
- Modo evitaobstáculos.
SELECCIÓN DE MODOS
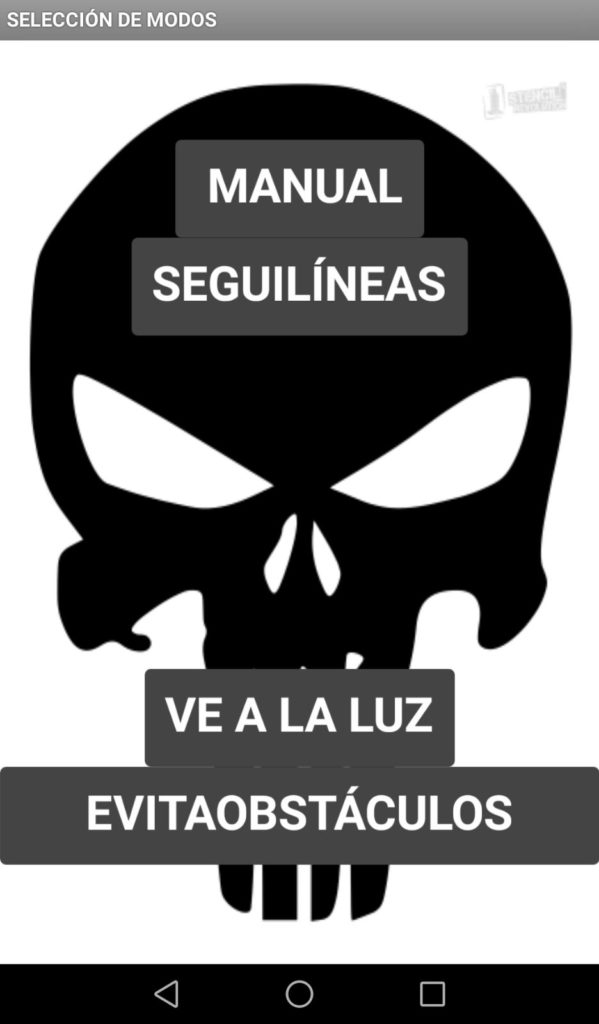
Si pulsamos cualquiera de los 4 botones accederemos en uno de los modos. Sé que no hacía falta explicarlo, pero por si las moscas.
MODO MANUAL
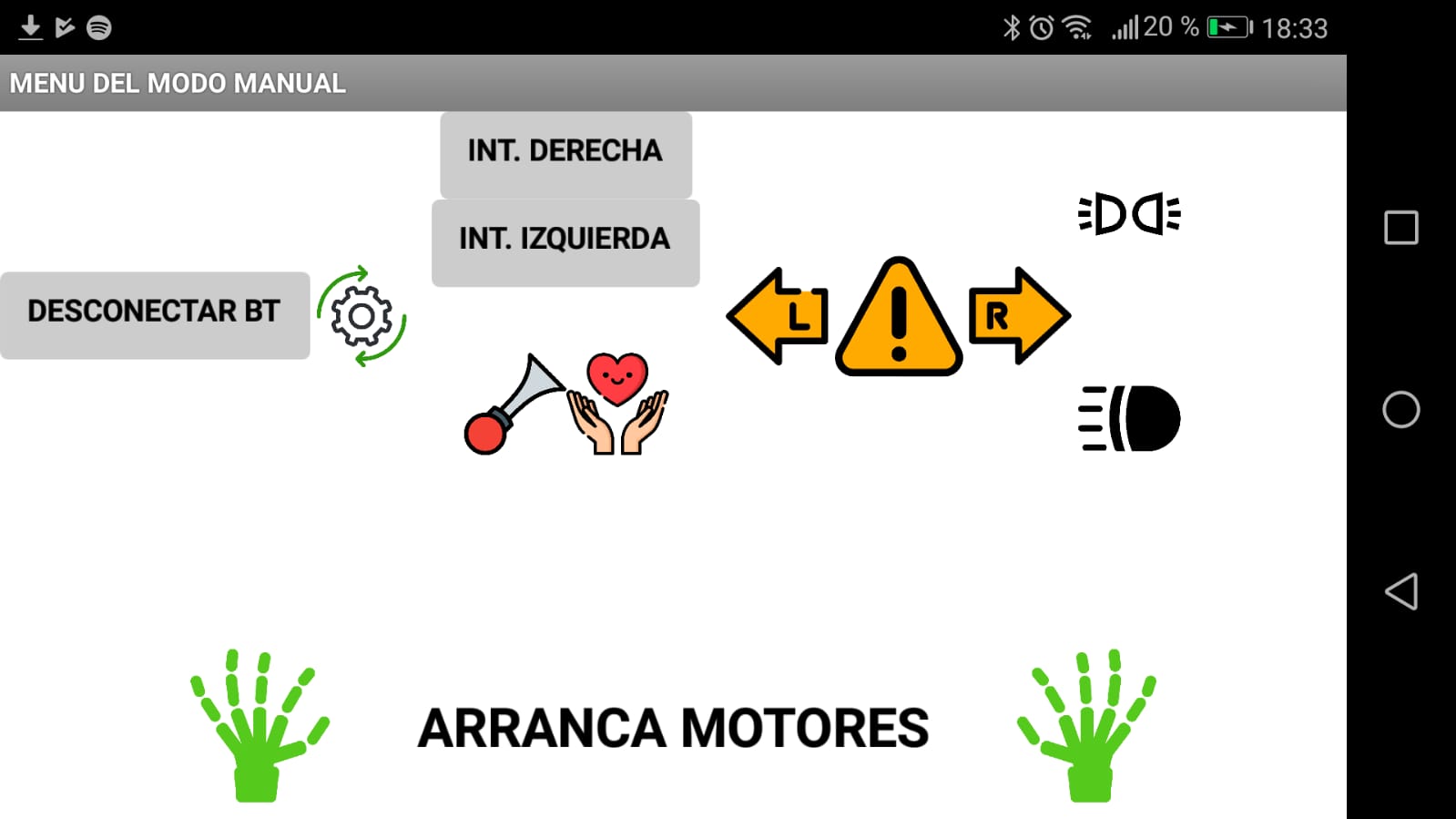
Este modo esta programado para que nuestro robot se comporte como si de un vehículo a motor se tratase.
En primer lugar tenemos un botón en el que pone ‘CONECTAR BT’ para enlazar el robot con nuestro móvil, una vez está enlazado entramos en el menú del modo manual, donde tenemos distintas opciones.
Empezaremos desde arriba a la izquierda hacia la derecha e iremos explicando qué hace cada botón.
El botón de ‘DESCONECTAR BT’, desenlaza el bluetooth del robot de nuestro móvil.
A su derecha, tenemos un engranaje con flechas verdes, este sirve para activar el control del robot según el acelerómetro del móvil, de esta manera podemos controlarlo inclinando nuestro teléfono. Una vez lo pulsamos las flechas de este cambian a color rojo, que si lo pulsamos otra vez detendrá el envío del acelerómetro y nuestro robot se parará, de manera que si a partir de ahora movemos el móvil no se moverá el robot.
El botón INT DERECHA, activa el intermitente de la derecha, en el robot se enciende el LED derecho de color ámbar, como si de un intermitente real fuera (el LED es de la tira de LED’s traseros). Se le ha añadido el ruido que hacen los relés del coche al encender y apagar las luces.
El botón INT IZQUIERDA, pues hace lo mismo que el de la derecha, pero enciende el LED de la izquierda.
El botón que tiene una bocina dibujada es el pito del robot, al pulsarlo emite un pitido por el buzzer.
El botón de las manos con un corazón al ser pulsado, abre ambos brazos, pinta en la matriz un corazón y escuchamos un fragmento de la canción ‘Love is in the air’, la cosa es que nos de un abrazo calavereico (es muy probable que esta palabra no exista, pero ya nos entendemos). Si lo volvemos a pulsar, cierra los brazos y apaga la matriz.
El triángulo de color naranja es como el botón del coche que enciende los cuatro intermitentes a la vez, si lo pulsamos estos se quedarán encendidos hasta que volvamos a pulsarlo, a diferencia de los intermitentes, que solo se encienden durante unos instantes.
El símbolo de las luces de cruce, si lo pulsamos enciende los LED’s delanteros como si de unos faros se tratasen. Si lo volvemos a pulsar se apagan.
El símbolo de las luces largas, si lo pulsamos hace una ráfaga de luces teniendo en cuenta si las luces estaban encendidas o apagadas.
El símbolo de una mano, de color verde, cierra y abre uno de los brazos, al igual que el otro botón situado al otro lado del texto.
El texto nos muestra información sobre que debes hacer o que está haciendo el robot.
En el modo manual, en todo momento el robot tiene el LED central encendido de color rojo simulando las luces traseras del coche. En el momento que el robot va hacia atrás, se enciende la luz de marcha atrás situada en la parte izquierda del robot de color blanco.
Cuando deseamos cambiar de modo le damos al botón de desconectar bt y le damos a la flecha para ir a la pantalla anterior (la flecha de tu móvil).
MODO SEGUILÍNEAS
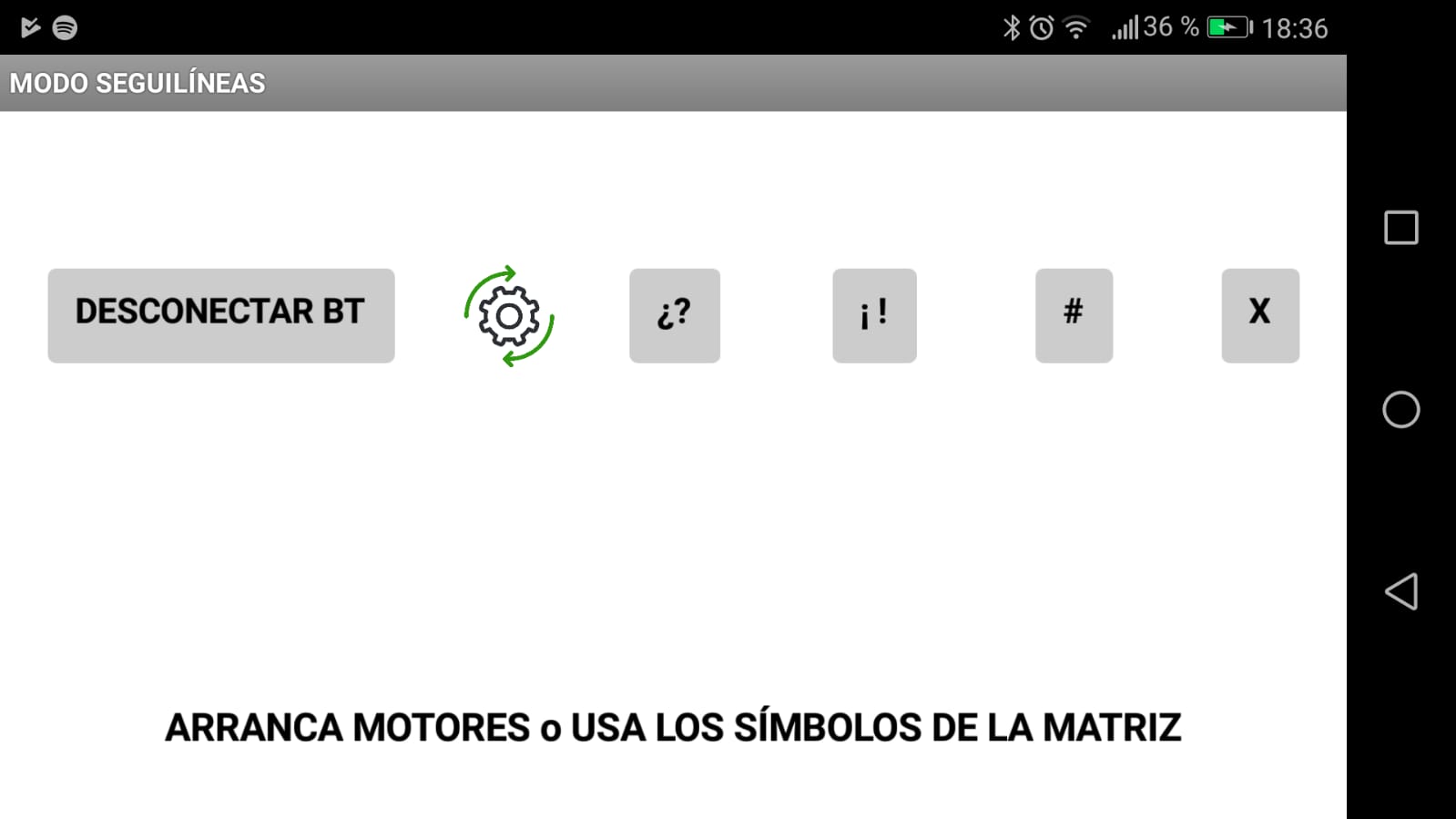
Al igual que en el modo anterior tanto los botones de conectar/desconectar bt y el engranaje sirven para lo mismo, pero en el caso del engranaje, en vez de utilizar el acelerómetro del móvil para moverse, utiliza las lecturas del sensor de infrarrojos situado en la parte inferior y delantera del robot y actúa según ellas.

Si queremos, podemos pulsar uno de los botones con signos que hay, esto hará que se dibujen estos símbolos en la matriz.
Para salir del modo actuamos igual que antes, desconectamos el bt y le damos a la flecha para ir a la pantalla de selección de modos.
MODO VE A LA LUZ
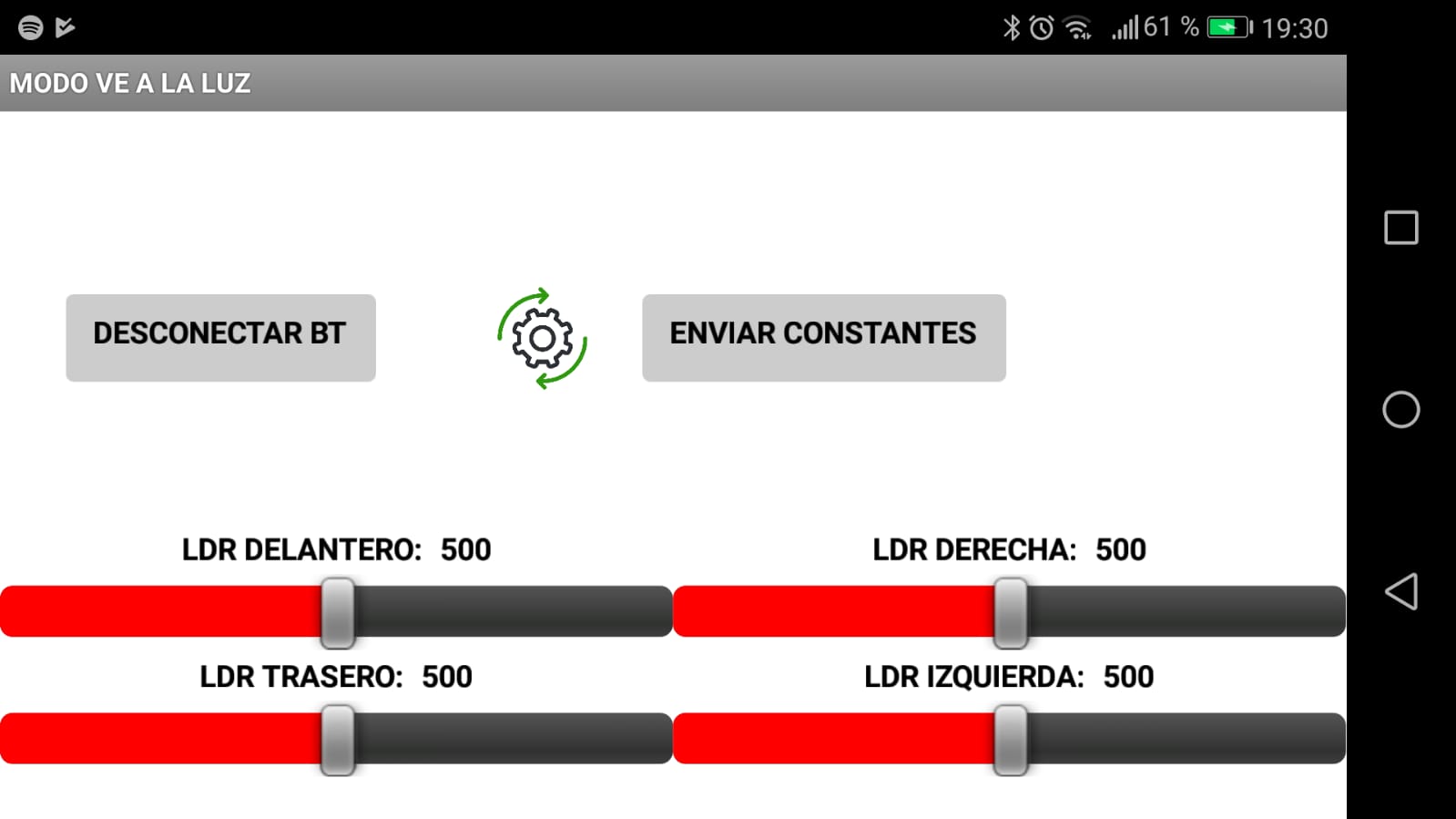
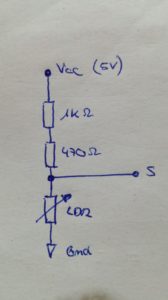
Esto modo se basa únicamente en la lectura de las resistencias LDR, estas son resistencias que varían su resistencia según la luz que incide sobre ella, de manera que en la oscuridad su resistencia es muy elevada y en la luz baja. Hemos utilizado esta propiedad para poder gobernar a Antonio iluminándolo con una linterna.
Hemos situado una LDR en el interior de cada soporte que previamente han sido pintados de color negro para evitar que la luz pueda ser reflejada en el interior de este (también porque hacían juego con el chasis, parecen los tubos de escape y quedan molones). La función de estos soportes, es aguantar la LDR en su lugar y evitar que la luz lateral le afecte.
La lectura de las LDR se lleva a cabo en los puertos analógicos de la placa de Arduino Nano y su funcionamiento se basa en un divisor de tensión muy sencillo, tal y como se muestra en el esquema.
Tras montar cada una de las LDR’s y cada una situada en una parte del robot, delante, derecha, izquierda y detrás, utilizaremos los ‘sliders’ (las barras esas de color rojo) de la aplicación. Con ellos podremos modificar la sensibilidad de los sensores de luz, ya que no hay la misma luz un día nublado que un día soleado.
Si subimos el valor la sensibilidad aumentará de tal manera que si nos pasamos el robot se moverá solo con la luz ambiente, al igual que si la bajamos mucho, ni poniéndole un foco delante de la LDR conseguiremos que se mueva. Este modo se basa en prueba y error. Lo normal está en torno de un valor de 600 o 700.
Una vez tengamos ajustado el valor, le daremos al botón de enviar constantes. El robot hará unas luces azules, cuando se hayan enviado todas las constantes, se apagarán, y el robot estará listo para poderlo controlar con la linterna.
Si Antonio no detecta nada, en su matriz saldrán unos interrogantes dando a entender que nos está buscando. En el momento que le iluminemos uno de los sensores, girará mostrando una flecha (en la matriz claro está) en el sentido del giro o dirección, se moverá hacia adelante o hacia atrás. Si lo iluminamos por delante saldrá un corazón en su matriz. Antonio es muy cariñoso como podéis observar.
MODO EVITAOBSTÁCULOS
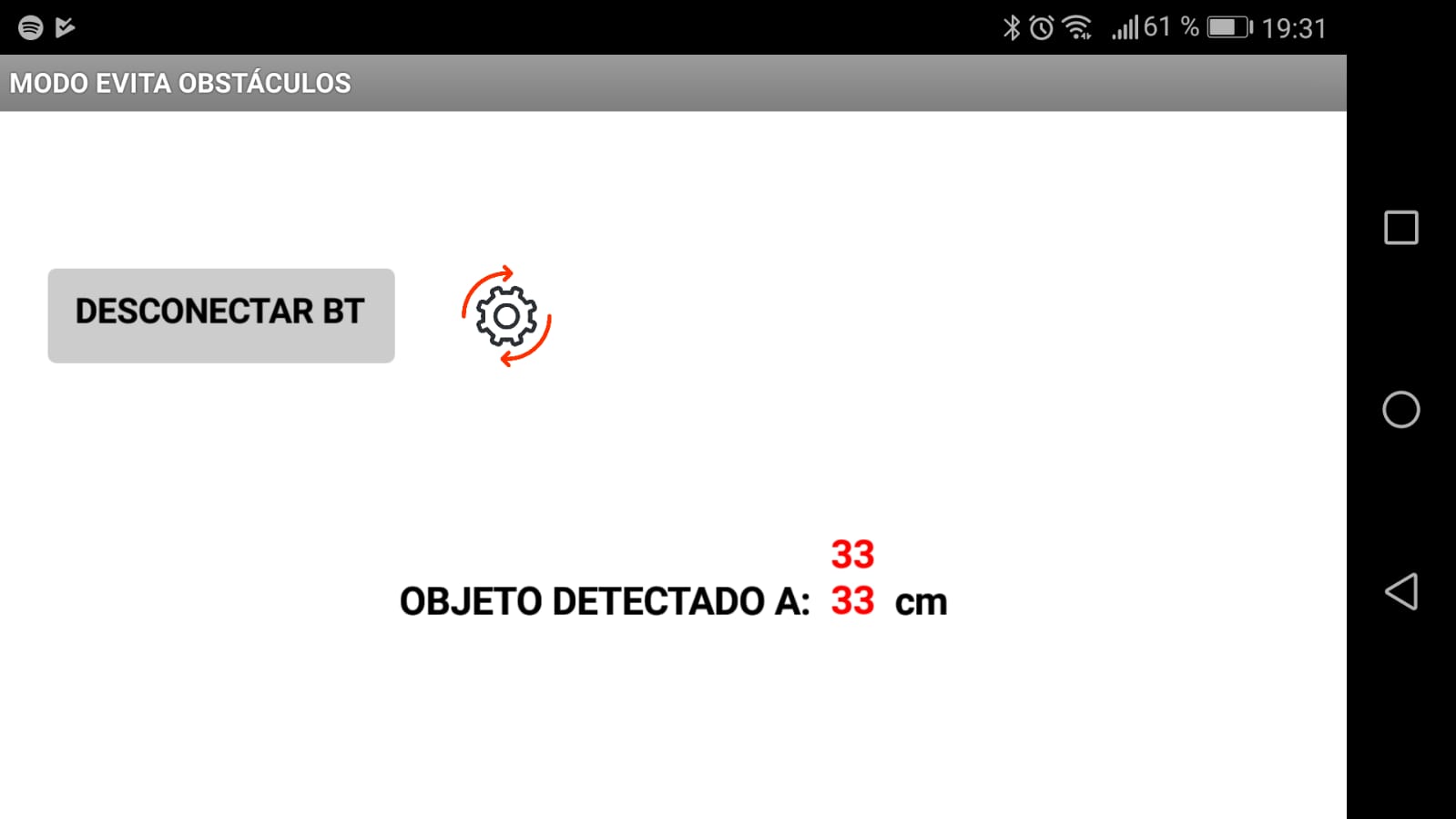
Ambos botones que hay en este modo ya han sido explicados anteriormente, en este caso el botón del engranaje activa o desactiva la lectura del sensor de ultrasonidos situado en los ojos de Antonio.
Si está activada la lectura del sensor de ultrasonidos, irá moviéndose a su gusto por la sala, a su vez nos irá mandando y mostrándonos por la pantalla del teléfono móvil la distancia a la que tiene los objetos respecto de él.
Antonio empieza a cambiar su trayectoria a partir de un metro y medio por delante suya, si el objecto se encuentra cerca, mostrará una exclamación por la matriz y si por algún motivo, un objeto cayese repentinamente a menos de 15 cm éste pararía en seco y tiraría marcha atrás con una X en la matriz a la vez que emitiría un pitidito (como si fuera un grito de susto, quedaba gracioso, no sé). Si el objeto cae encima de Antonio probablemente muera aplastado, no es recomendable tirarle cosas encima. Es tan solo un consejo, cada uno que torture a su Antonio como quiera.
Videos
DESPEDIDA
Espero que os haya servido y hayáis cogido alguna que otra idea y la mejoréis.
Si tras leer todo este rollo esperabas encontrar el trabajo hecho, siento fastidiarte, pero no lo vas a encontrar. He subido esto para dar información e ideas, no para trabajar para otros.
Cúrratelo y diviértete por el camino que de eso se trata.
Atentamente Antonio y su creador.[:]