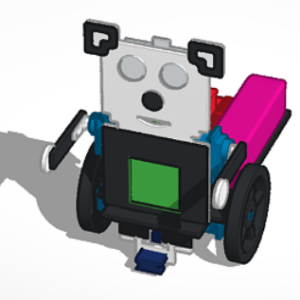
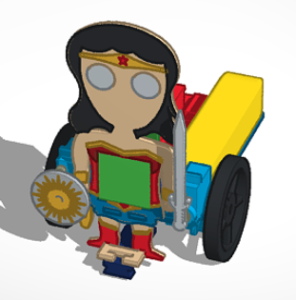
[:es]Estos modelos contienen la misma electrónica que el diseño original del robot DYOR. Sin embargo su configuración el ligeramente diferente, ya que en vez de mover unas pinzas, los robots mueven sus brazos. Se trata de un robot con dos ruedas delanteras controladas por unos servos de rotación continua y dos servos de posición para el control de unos brazos. Además, incluye una matriz de LEDs para generar expresiones, un zumbador de sonido, un sensor de ultrasonidos, un módulo de seguimiento de líneas TCRT5000 y un módulo bluetooth. El robot se controla con Arduino Nano v3.0, que junto con una placa de expansión y un pequeño powerbank permiten controlar y alimentar a toda la electrónica.
¿Qué modelos puedo utilizar?
Dentro de este modelo, podemos encontrar los robots DYOR BatBot, DYOR ImperialBot, DYOR MinionBot, DYOR PandaBot, DYOR SteveBot, DYOR WonderBot, etc… Todos ellos disponen de elementos comunes en su configuración
¿Cómo puedo fabricarlo?
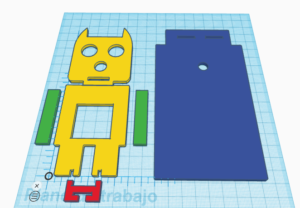
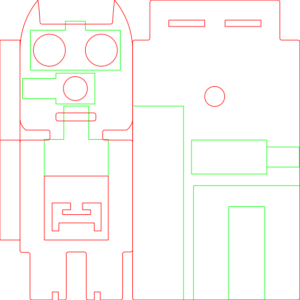
El robot puede fabricarse mediante corte por láser, imprimirse en 3D, mediante moldes o por supuesto, de forma manual.
Entradas relacionadas:
[:es]Ensamblaje DYOR PandaBot[:en]Assembly of DYOR PandaBot[:]

[:es]Ensamblaje DYOR MinionBot[:en]Assembly of DYOR MinionBot[:]
[:es]Ensamblaje DYOR WonderBot[:en]Assembly of DYOR WonderBot[:]

[:es]Ensamblaje DYOR ImperialBot[:en]Assembly of DYOR ImperialBot[:]

[:es]Ensamblaje DYOR BatBot[:en]Assembly of DYOR BatBot[:]

[:es]Ensamblaje robot DYOR SteveBot[:en]Assembly of DYOR SteveBot[:]
[:es]Personalización de DYOR BatBot con TinkerCAD[:en]Customization of DYOR BatBot with TinkerCAD[:]
Personalización robot DYOR con brazos
How can I use it?
Within these models, we can find DYOR BatBot, DYOR ImperialBot, DYOR MinionBot, DYOR PandaBot, DYOR SteveBot, DYOR WonderBot, etc… All of them have common elements in their configuration.
How to make it?
The robot can be made of wood with laser cutting, plastic with 3D printing, resins with moulds and obviously any other way, including hand made manufacturing.
Related Entries:
[:es]Ensamblaje DYOR PandaBot[:en]Assembly of DYOR PandaBot[:]
[:es]Ensamblaje DYOR MinionBot[:en]Assembly of DYOR MinionBot[:]
[:es]Ensamblaje DYOR WonderBot[:en]Assembly of DYOR WonderBot[:]
[:es]Ensamblaje DYOR ImperialBot[:en]Assembly of DYOR ImperialBot[:]
[:es]Ensamblaje DYOR BatBot[:en]Assembly of DYOR BatBot[:]
[:es]Ensamblaje robot DYOR SteveBot[:en]Assembly of DYOR SteveBot[:]
[:es]Personalización de DYOR BatBot con TinkerCAD[:en]Customization of DYOR BatBot with TinkerCAD[:]