[:es][:es]
INTRODUCCIÓN
Este proyecto se basa en la realización de tu propio robot DYOR desde 0, partiendo de la construcción pieza por pieza de este y la posterior programación para que realice unas funciones previamente definidas, así como su movimiento. El objetivo es conseguir que el robot realice las funciones correctamente, tal y como hemos visto en las simulaciones de clase realizadas con el robot DYOR en el programa Coppelia SIM.
Materiales a utilizar:
Los materiales utilizados en la realización de El Nano son las siguientes:
• 1 × Tablero de control ATMEGA328P // reemplazable por arduino
• 1 × placa de expansión
• 1 × L298N driver board
• 1 × HC-SR04 módulo ultrasónico
• 1 × módulo de seguimiento de cuatro vías
• 4 × Módulo de detección infrarroja
• 4 × motor de CC
• 1 × soporte ultrasónico
• 1 × Servo
• 1 × soporte Servo
• 4 ruedas de goma
• 4 × disco de código de velocidad
• 8 × soporte de fijación de motorreductor en forma de T
• 1 caja de batería 18650 5
• 10 × M3 * 30 poste de cobre de doble paso
• Pilar de cobre de doble paso 6 × M3 * 15
• Tuerca 16 × M3
• Tornillo de cabeza plana 36 × M3 * 8
• 8 × M3 * 30 tornillo de cabeza redonda
• 5 × M2 * 12 tornillo de cabeza redonda
• Tuerca 5 × M2
• 6 × M1.6 * 8 tornillo de cabeza redonda
• Tuerca 6 × M1.6 • 3 × M2 * 8 tornillos autorroscantes
• Cable Dupont hembra a hembra 38 × 20cm
• Cable Dupont macho a macho 12 × 20cm
• Placa inferior del coche de 4 ruedas de acrílico de 2 ×
Estas piezas las podemos encontrar en un kit de amazon que llega con relativa rapidez.
EL NANO
El Nano es el nombre del robot que he realizado, en la siguientes imágenes podemos observar su vista final:
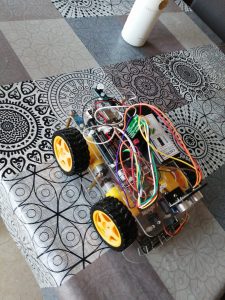


Como podemos apreciar en las imágenes El Nano es un robot móvil de 4 ruedas bastante sólido y con una gran cantidad de cables debido a la gran cantidad de sensores que tiene. Podemos observar como tiene dos sensores de proximidad por luz infrarroja trasera, un sonar en la parte delantera, un buzzer con el cual podemos realizar sonidos como pitidos, un receptor IR relacionado con funciones de mando a distancia, un medidor de voltaje con el que podemos ver si la tensión es suficiente para el funcionamiento del robot muy importante ya que nos permite además saber el estado de nuestra batería y finalmente en la parte delantera cerca del suelo dispone de sensor de seguimiento.
Funcionalidades de El Nano
- Movimiento libre en todas las direcciones guiado por bluetooth:
El Nano es capaz de moverse en todas las direcciones deseadas, de manera que puede ser teledirigido por la persona que lo controla, para esta funcionalidad hacemos uso de un módulo HC con el cual nos podremos conectar a bluetooth con El Nano y enviarle las acciones que queremos que realice.
Por otro lado, cuenta con dos velocidades la velocidad normal y la velocidad turbo la cual posee mucha más velocidad.
Aquí podemos ver un video en el que podemos observar la diferencia de ambos modos:
- Evita obstáculos
Gracias al sonar que posee en la parte delantera y al servo que posee el sonar le permite al robot leer distancias en diferentes posiciones no solo en una por lo que leería lo que tiene delante y a los costados puesto que el sonar esta en constante movimiento debido al servo, la funcionalidad será detectar y en función de lo detectado realizar el movimiento más óptimo con el objetivo de evitar la colisión.
Aquí podemos observar un video en el cual vemos como detecta obstáculos y los esquiva:
- Sigue Líneas
Gracias al sensor de seguimiento El Nano puede detectar una linea de color oscuro y seguirla para ello este sensor posee 5 entradas en las cuales detectara la linea negra, cuando los sensores más alejados del centro detecten la linea negra entonces reconducirán su posición hasta centrarla consiguiendo de esta forma que el robot no salga del trazado.
Aquí podemos observar su funcionamiento:
- Sigue objeto
Gracias a los sensores de proximidad de la parte trasera realizaba la función de seguir objeto, sí y digo realizaba porque fundí los sensores, recuerden no poner la masa donde hay que poner el voltaje y viceversa. No tengo video pues no lo grabé pero es una función que podría realizar El Nano con los sensores nuevos.
Interfaz aplicación
El robot y todas sus funcionalidades son controladas vía bluetooth por el móvil y para ello hemos de precisar de una aplicación bien configurada, para ello hacemos uso del MIT APP que te permite crear tu propia aplicación para Android.
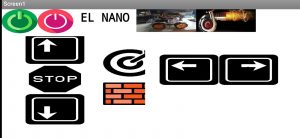
En esta imagen podemos ver como queda el interfaz de la aplicación, en la barra superior encontramos los botones de encendido y apagado con el nombre del robot y los modos normal y turbo, en los laterales los controles y el botón de stop y finalmente en el centro tenemos los modos sigue líneas y evita obstáculos.
A continuación mostraré el diagrama de bloques con el que viene configurada la aplicación:
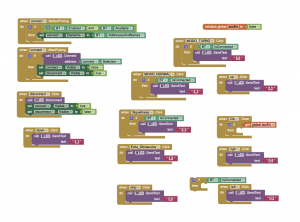
En él se ve configurado el bluetooth, timer y los diferentes botones para que posteriormente puedan ser programados en el arduino.
Conclusión
Para acabar añadir que me ha gustado mucho la realización del proyecto, estoy muy satisfecho con El Nano ha sido un trabajo sobre todo a la hora de la programación laborioso y el saber como coordinar los pines y salidas desde 0 también ha sido costoso. Lo importante de todo esto es que ha merecido la pena.[:][:]