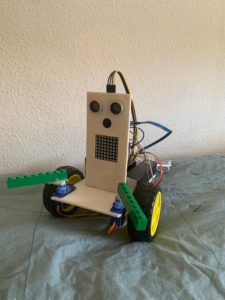
[:es]En esta entrada se muestra como se ha creado el robot y podrás comprobar su funcionamiento.
Componentes
En primer lugar la base y la parte frontal han sido diseñadas en TinkerCAD teniendo en cuenta las dimensiones de los componentes electrónicos de forma que en el ensamblaje puedan ser colocados de forma correcta.
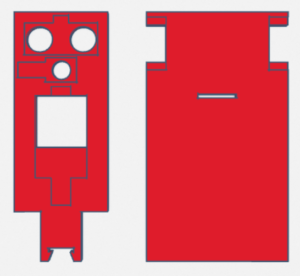
Una vez diseñados se imprimen por impresión 3D y se lijan para eliminar las posibles imperfecciones de la impresión.
En cuanto a la electrónica necesaria para la creación del robot, los materiales que necesitarás son:
- Arduino Nano v3.0 + I/O Extension Shield para Arduino Nano
- Powerbank
- Sensor Ultrasonidos HC-SR04
- Zumbador de sonido KY-006
- 2x Micro Servo SG90 (para los brazos)*
- 2x Motor Smart Car (para las ruedas)
- 2x Ruedas Smart Car
- Driver Dual DRV8833*
- SPP-C Bluetooth
- Rueda loca
- Matriz de LEDs 8×8
- Piezas de LEGO
- Cable USB 2.0 (tipo A) – mini USB (tipo B)
- x30 Cables DuPont H-H
Aviso: para el ensamblaje de los elementos marcados con un ‘*’ es necesario soldar los pines/cables.
Control manual
Para el control del robot hacemos uso del módulo Bluetooth y se diseña una aplicación desde App Inventor para su control desde un dispositivo móvil, el diseño realizado es el siguiente:
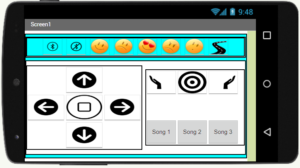
Desde esta aplicación se podrá controlar el movimiento del robot (rectilíneo + giro), el movimiento de los brazos del robot, la expresión en la matriz de LEDs y la música reproducida en el zumbador.
Funcionamiento
A continuación se muestra un video del funcionamiento:
[:]