En esta entrada se mostrará el diseño de MiniRobot. Además, también se especificarán los componentes electrónicos usados y los diferentes modos de funcionamiento. Este modelo está inspirado en el robot DYOR de la página robótica fácil.
MINIROBOT DYOR
Diseño
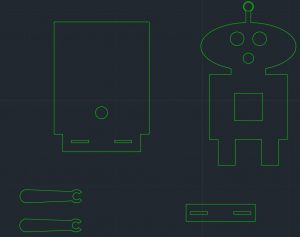
Para el diseño del robot, se ha hecho uso de la aplicación AutoCAD. A continuación se mostrará una captura del diseño de las piezas:
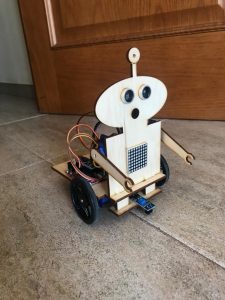
Una vez montado, el robot tendría el aspecto siguiente:

Componentes electrónicos
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Sensor Ultrasonidos HC-SR04
- Zumbador KY-006
- Módulo Seguilíneas TCRT5000
- SPP-C Bluetooth (compatible HC-06)
- Matriz de LEDs 8×8 max7219
- 2 Servos SG90 (brazos)
- 2 Servos FS90R (ruedas)
- 2 ruedas FS90R
- Rueda loca
- Cable Mini-USB
- Cables DuPont Hembra-Hembra
Funciones
El robot puede realizar diferentes funciones:
- Seguilíneas: el robot será capaz de seguir la trayectoria de una línea negra. Si se desvía, es capaz de volver a la línea.
- Evita obstáculos: cuando el robot se encuentre con un obstáculo, este emitirá un sonido de enfado y en la matriz de LEDs aparecerá una expresión de «enfadado». Cuando esquive el obstáculo, en la matriz de LEDs aparecerá una expresión de «feliz».
- Control remoto
Además, estas funciones están integradas en una aplicación que hemos diseñado previamente, y que controlaremos por mediante del Bluetooth. Tiene el siguiente aspecto:
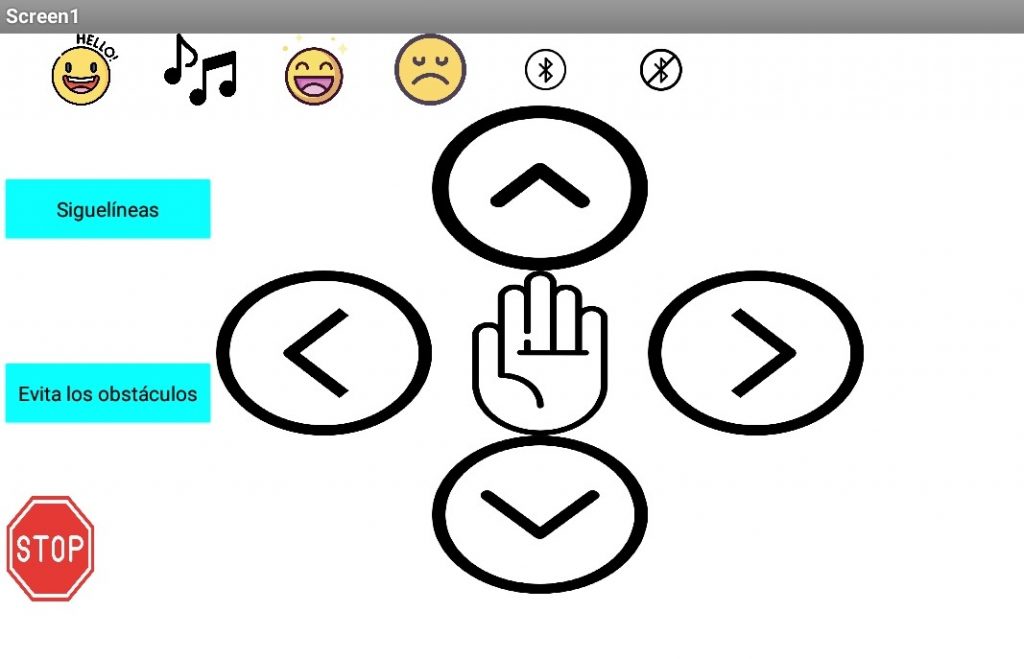
En esta aplicación también se pueden hacer las siguientes cosas:
- Saludo: saluda con el brazo y en la matriz de LEDs aparece «HI».
- Bailar al ritmo de una canción.
- Mostrar las expresiones de tristeza y felicidad por la matriz de LEDs.