[:es]En esta entrada se muestra el proceso de la construcción del SapoBot incluyendo el diseño, los componentes y una explicación de su funcionamiento.
Diseño
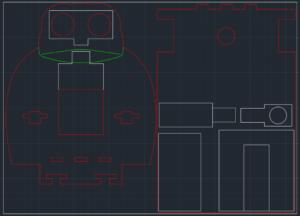
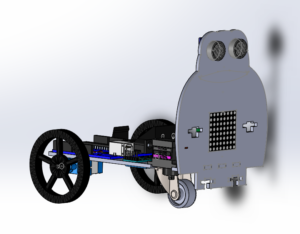
Por comienzo del proyecto se definió como concepto un robot que consta de dos placas de FDM (3mm) cortadas con un láser en las que se montan los componentes eléctricos y mecánicos.
El diseño de la base se realizó en AutoCAD. En este dibujo ya está incluido el posicionamiento de los componentes, utilizando un color diferente para indicar que estas líneas no se deben cortar con el láser. Exportando el dibujo e importándolo en SolidWorks comprobé el diseño. Para esto ensamblé los modelos del base con modelos geométricos de otros componentes.
Decidí usar como tema del proyecto el sapo. Por lo tanto, también las figuras de la matriz de LED y la aplicación se adaptaron a este tema.
Componentes
- FDM 3mm cortado por láser
- Arduino Nano
- I/O Extension Shield para Arduino Nano
- Cable mini-USB
- 2 Micro Servos FS90R
- 2 Ruedas FS90R
- Micro Servo SG90
- Rueda Loca
- Sensor Ultrasonido HC-SR04
- Zumbador KY-006
- Matriz de LEDs 8×8 max7219
- 2 Módulos Seguilineas TSRT500
- SPP-C Bluetooth (compatible HC-06)
- 2 Sensores Luz LDR KY-018
- Powerbank 10000mAh
- Cables
- Tornillos y Tuercas M3
- Piezas Lego
Montaje y problemas
La mayoría de los componentes están montados con pegamento caliente. Algunas componentes, por ejemplo la rueda loca y el extension-shield del Arduino, están montados con tornillos y tuercas. Esto facilita el desmontaje de los componentes para reutilizarlas o limpiarlas. Por ejemplo, tuve que limpiar el rodamiento de la rueda una vez.
Durante el proceso del montaje y la programación ocurrieron algunos problemas que había que resolver. Primero, la disposición de algunos componentes resultó ser no sensata. Por ejemplo, a diferencia con el modelo en SolidWorks, cambié la posición de las ruedas FS90R con la de la rueda loca. Este cambió mejoró la estabilidad y el comportamiento dinámico. Escribiendo el código de Arduino, mi portátil tuvo dificultades conectándose al Arduino Nano. Reemplace el microcontrolador por un RF nano y pude resolver este problema. Algunos pines de este controlador no funcionaron adecuadamente, por lo que realicé el programa siguelineas con un solo sensor y prescindí de usar el micrófono. Por último, después de un cierto tiempo de uso, el contacto de la portapilas apareció oxidado y no suministró una tensión suficiente, por lo que cambié la alimentación a un Powerbank.


Funcionamiento
El robot se controla mediante una aplicación para el móvil. Esta aplicación se ha desarrollado utilizando App Inventor. Primero hay que conectar el bluetooth del robot con la aplicación y después se elige el modo de accionamiento.


Evitar obstáculos/parar enfrente de obstáculos
Estas dos opciones se pueden encender para el control manual o las otras acciones autónomas. Funcionan con el sensor de ultrasonido que mide la distancia del robot a un posible obstáculo en su frente.
Cuando el “evitar obstáculos” está encendido, el robot realiza un giro de 90° al detectar un obstáculo.
Para la opción “parar enfrente de obstáculos”, el robot disminuye su velocidad en línea recta al acercarse a un obstáculo. Sin embargo, la velocidad de giro no se reduce hasta cero para que el robot no quede inmovible.
Control manual
Para el control manual se abre otra pantalla, donde aparecen algunos botones y un joystick. Con el joystick se controla la dirección y velocidad del movimiento del robot y con los botones se controlan la matriz de LEDs, la pinza y se puede hacer que el robot toque una canción. Al pulsar el home-botón se vuelve a la pantalla inicial.
Seguimiento de líneas
El robot realiza un camino marcado por una línea, que es oscura, mientras que su entorno es claro. El robot recibe datas de un módulo de infrarrojo que mide la claridad de una superficie y con este valor calcula la velocidad de giro.
Seguimiento de luz
El robot sigue una fuente de luz. Dispone de dos sensores que miden la iluminación y, por lo tanto, calcula, en cuál de sus lados hay más luz. Se dirige a la dirección correspondiente.
Videos
En el siguiente video se muestra el funcionamiento del SapoBot:
Planos, código y aplicación
Autor
Anton Weber[:]