This post introduces NodeBot a low cost Arduino Robot.
Introduction
The concept consists of a circular shaped robot with an alternative configuration of wheels. The wheel configuration is comprised of two castor wheels and two fixed wheels. In this way, the robot could move as a rotating disk minimizing the space needed to turn and manoeuvre. It will also have a central sensing unit located at the front of the robot. This will consist of two sensors to detect obstacles to the side, one sensor to detect obstacles from the front and then finally a sensor to detect light changes on the surface that the robot operates on. For debugging purposes, an OLED display will be placed on the mobile robot indicating its current operation.
Scheme

Part List
| Part | Quantity |
| Sensor Laser VL53L0X | 2 |
| Prototype Board (170 pins) | 1 |
| Adaptor USB to DC connector | 1 |
| Nylon Standoff Kit | 1 |
| Castor Wheel | 2 |
| FS90R servo | 2 |
| 60mm Wheel for servo | 2 |
| NodeMCU V3 ESP8266 | 1 |
| Shield for NodeMCU V3 | 1 |
| PCA9685 16 Channel for PWM and Servos | 1 |
| OLED Display 128×32 | 1 |
| Line Follow Sensor TCRT500 | 1 |
Final Robot
Final robot as designed in CAD to completely house and place components and sensors in their necessary position in space.



Robot assembly Drawing
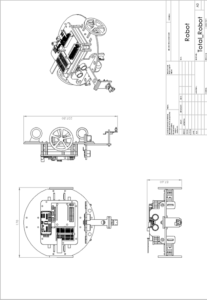
Laser Cutting Layout
Dimensions: 316x 193mm

Python Interface
Python GUI that has a backend communicating through TCP sockets with strings to the nodemcu. The GUI, has 4 buttons for the various modes, one stick for manual mode and an IP selector.

Functions
- Manual Drive
- Line Following
- Obstacle Avoidance
- Sensor Display