[:es]El propósito de esta entrada es indicar los pasos necesarios para lograr hacer un diseño CAD muy básico para representar el componente de medición de distancias basado en el sensor de ultrasonidos HC-SR04 de vuestro robot.
Nuestro objetivo de diseño es lograr obtener un diseño CAD para el módulo de medición de distancias basado en el sensor de ultrasonidos HC-SR04. Mencionar que este módulo irá colocado sobre la parte frontal del robot, siendo necesario realizar dos agujeros de radio 8mm para la inserción de las cápsulas con las membranas de medición. Una vez dentro, la placa electrónica irá pegada al frontal. Por ello, utilizaremos la capa de corte para los orificios y la capa de grabado superficial simplemente para hacer marcas sobre el frontal con la forma del sensor para la colocación del componente.
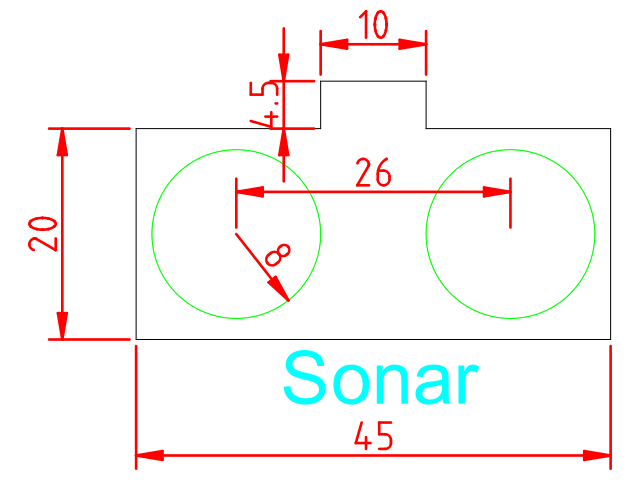
La medidas del sensor HC-SR04 son como se muestra a continuación:
A partir del fichero de plantilla para los componentes:
Seleccionamos primero la capa «Grabado Superficial» y creamos una polilínea con el siguiente conjunto de comandos:
polyline
0,0
@45,0
@0,20
@-17.5,0
@0,4.5
@-10,0
@0,-4.5
@-17.5,0
@0,-20
Después creamos dos círculos en la capa de corte:
circle
9.5,10
8
circle
35.5,10
8
Posteriormente en la capa de «Anotaciones», vamos a escribir un texto seleccionando la herramienta «Texto» del menú de herramientas (a la izquierda). Seleccionad la letra y tamaño de fuente conforme creáis conveniente (nosotros utilizamos Arial tamaño 5).
Finalmente podéis también añadir cotas, seleccionando la capa de Cotas, y utilizando las «Herramientas de dimensión» del menú de herramientas.
Aquí podéis descargar el fichero DXF con la solución:
[:en]The purpose of this entry is to show necessary steps to create a CAD design to represent the ultrasound sensor HC-SR04 of your robot.
Our design aim is to obtain a CAD design for the range distance module based on the HC-SR04 ultrasound sensor. This sensor is part of the robot’s face, so we require two holes of 8mm radius to fit the caps of the sensor. Once insice, the ultrasound sensor will be glued to the face (on the back side). We will use a cutting layer for the holes and and an auxiliary layer for the shape of the sensor.
Dimensions of the sensor are shown below:
We will use the following template:
Select the auxiliary layer and create a polyline with the following commands:
polyline
0,0
@45,0
@0,20
@-17.5,0
@0,4.5
@-10,0
@0,-4.5
@-17.5,0
@0,-20
Afterwards, create two circles in the cutting layer:
circle
9.5,10
8
circle
35.5,10
8
Finally, we can add dimensions and text on the auxiliary layer by selecting the appropriate tools on the left-side menu.
Here, you can find the DXF file with the solution:
[:]