Descripción
En este proyecto he desarrollado un hexápodo impreso en 3D, un robot de seis patas que combina mecánica, electrónica y programación en una estructura compacta y funcional.El robot está impulsado por 18 servomotores, tres por pata, lo que le permite realizar movimientos coordinados y estables. Su sistema de control se basa en una placa electrónica central (ESP32), que gestiona tanto los movimientos como la comunicación con el usuario.La interacción con el hexápodo se realiza mediante una app Bluetooth, desde la cual se pueden ejecutar comandos básicos como avanzar, retroceder y girar. Además, cuenta con una simpática función de saludo animado, que le da un toque más interactivo y divertido.


Listado de Componentes
- ESP32 (Comunicación Bluetooth)
- 18 Servomotores MG90s
- 2 PCA9685 (Controladores de Servos)
- 2 XL4015 (Reguladores de Tensión)
- Interruptor + Baterias 18650 (Alta corriente)
- Tornilleria (Tornillos, Tuercas, Rodamientos…)
- Cable 16 AWG
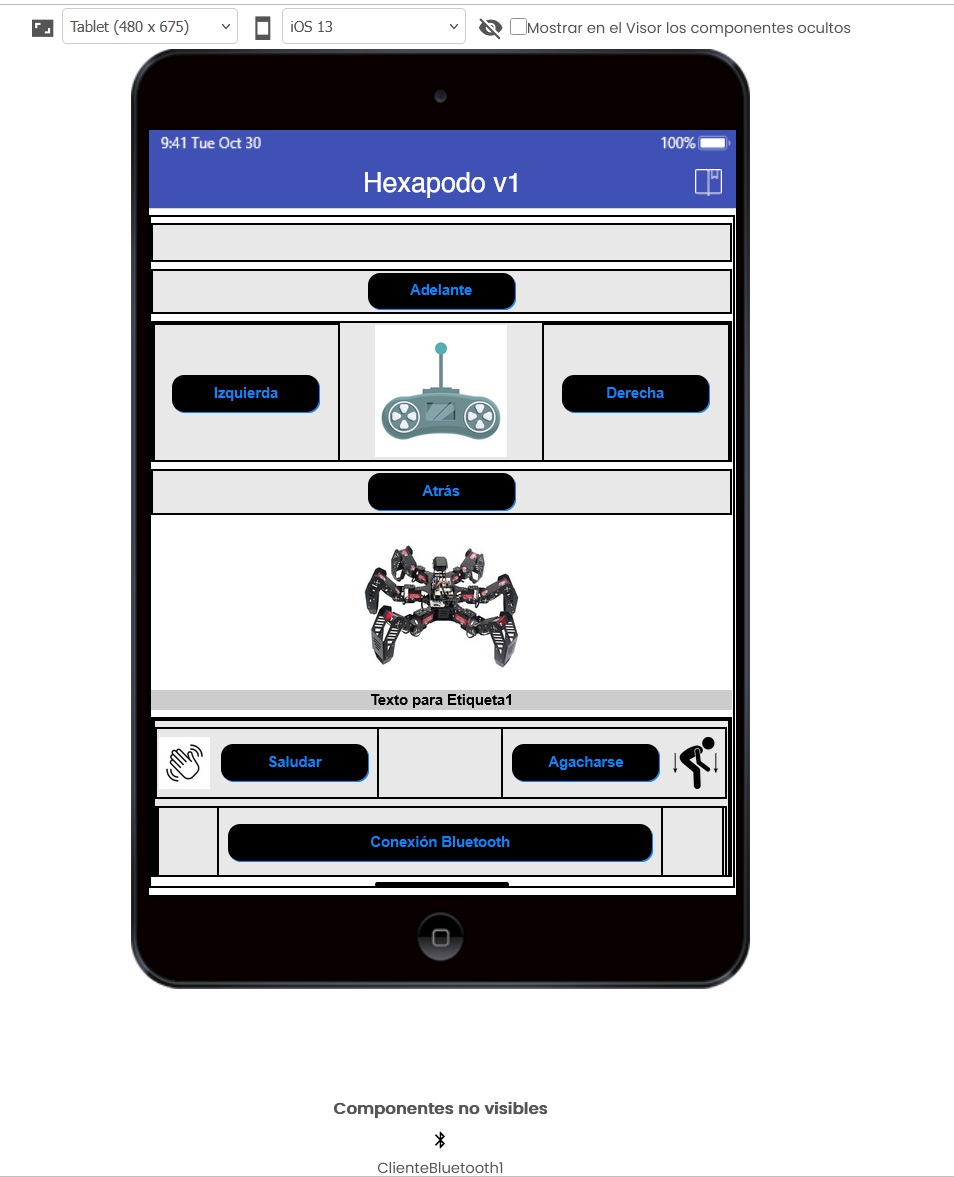
Diseño APP (APP INVENTOR)
Se ha diseñado una aplicación para el control mediante bluetooth de los movimientos del robot cuya interfaz es la siguiente :
Fase de Programación
A la hora de programar ha sido muy importante la correcta calibración de los servomotores mediante pulsos.
Se ha diseñado un programa de calibración que envía pulsos de 5 en 5 a los servomotores de los distintos PCA9685 con el fin de ver su movimiento real y estimar el ángulo máximo y mínimo de cada servomotor.
Tras esto, se redacta el código principal mediante una serie de librerías como pueden ser Wire.h , BluetoothSerial.h y Adafruit_PWMServoDriver.h
Conclusiones y Videos
A la hora de realizar las pruebas de movimiento se observa que el robot realiza un correcto movimiento pero al deslizar sobre la superficie debido al material del cual está fabricado no consigue avanzar, esto se puede solucionar poniendo cinta aislante o algún material que no deslice en la base da cada pata.
1.SALUDO
2.AVANCE
Contacto : pdelval2@upv.edu.es
Diseño 3d : https://www.thingiverse.com/thing:6760071