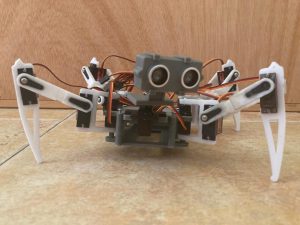
En esta entrada se muestra el robot cuadrúpedo realizado para la asignatura de robótica móvil curso 2021-2022.
Robot Araña qPed

Diseño:
Diseño 3d:
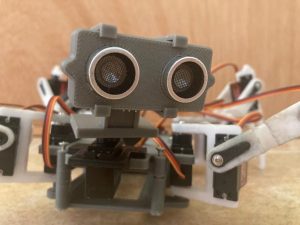
Para el diseño de la estructura del robot se han empleado los modelos 3d de las piezas del proyecto de thingiverse (robot araña). Las patas y la parte inferior de la base no se han modificado, sin embargo, la parte superior se ha adaptado para poder llevar el sensor de ultrasonidos y otro servo. Además, para el encapsulado del sensor se modificó otro proyecto de thingiverse (encapsulado) con el objetivo de poder unirlo a un servo.

Diseño Circuitería:
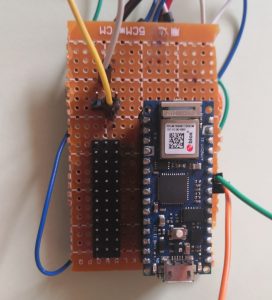
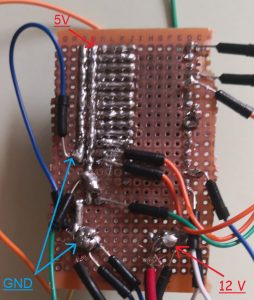
El circuito que se ha soldado en la placa perforada se muestra en esquemático desarrollado en KiCAD que se adjunta a continuación. Hay que tener en cuenta que el programa de diseño no cuenta con los servos, el sensor ni la placa IoT 33 sin embargo se han utilizado imágenes o componentes similares para representarlos:
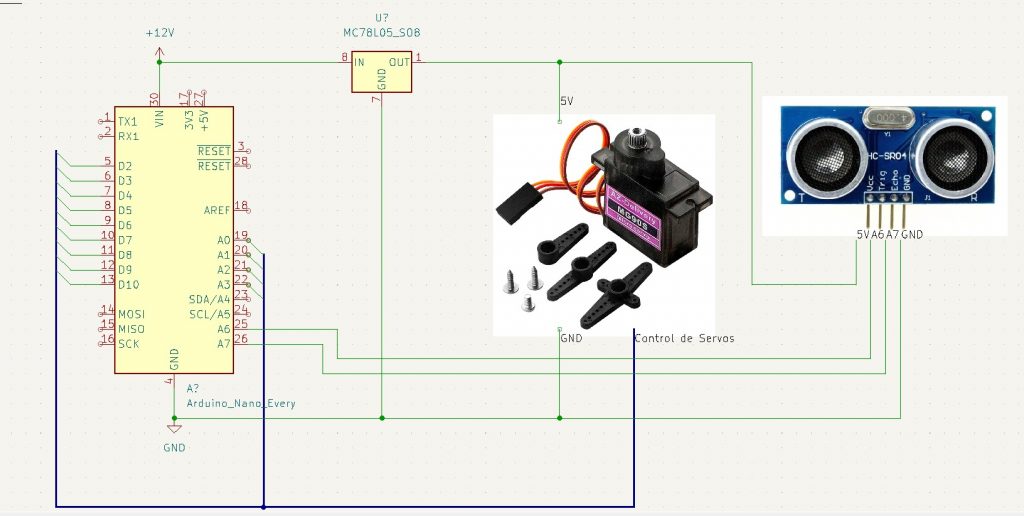
Los objetivos principales respecto al circuito era que pudiese alimentar directamente desde la batería el Arduino y además asegurar 5 V y 500mA a los servomotores para poder moverlos.
Diseño Programación Arduino:
El programa Arduino desarrollado consiste en una agrupación de algoritmos que definen el movimiento del robot y un fragmento que consigue conectar el Arduino a la APP del móvil mediante el BLE integrado en la placa Iot 33. Los algoritmos implementados son:
-
-
- Levantarse: Inicia el robot elevando la base con sus 4 patas.
- Avanzar: Mueve el robot hacia delante mediante una secuencia que avanza las patas diagonalmente.
- Retroceder: Repite el algoritmo de anterior, pero con la dirección opuesta.
- Derecha: Mueve el robot hacia la derecha moviendo las patas diagonales en sentido contrario.
- Izquierda: Mueve el robot hacia la izquierda, de manera similar al algoritmo anterior pero las patas cambian el sentido de movimiento.
- Medir: Captura la distancia que mide el sensor de ultrasonidos y reorienta el sensor mediante un servo.
- Bailar: Realiza un movimiento coordinado con las patas traseras.
- Saludar: Mueve una pata delantera para hacer un movimiento similar a un saludo.
-
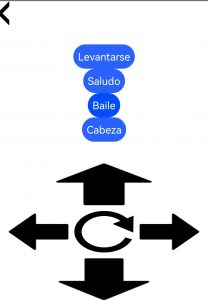
Diseño Programación APP:
Respecto la aplicación para controlar el robot, se ha desarrollado en Thunkable partiendo de un programa base que se aportó en la asignatura de robótica móvil. Las pequeñas modificaciones aplicadas fueron quitar, añadir y ocultar botones según las funciones del robot, además de introducir sonidos.


Componentes:
- Arduino NANO IoT 33.
- Sensor de ultrasonidos HC-SR04.
- Servos MG90S x13.
- Regulador de tensión 5 V, 2 A. (ej. MC7805ABD2TG).
- Perfboard.
- Batería LiPo de 12 V y 2.2 A.
- Piezas impresas en 3d.
- Tornillería.





Videos:
Levantar Robot:
Baile:
Mover Cabeza:
Avanzar:
Retroceder: