[:es][:es]En esta entrada os muestro mi robot diseñado y construido para la la asignatura de robótica fácil, en la mención de robótica del grado de ingeniería electrónica industrial y automática.
Esquemas, planos y fotos del robot móvil
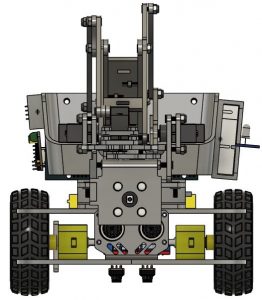
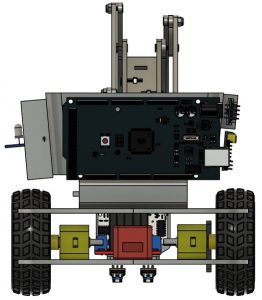
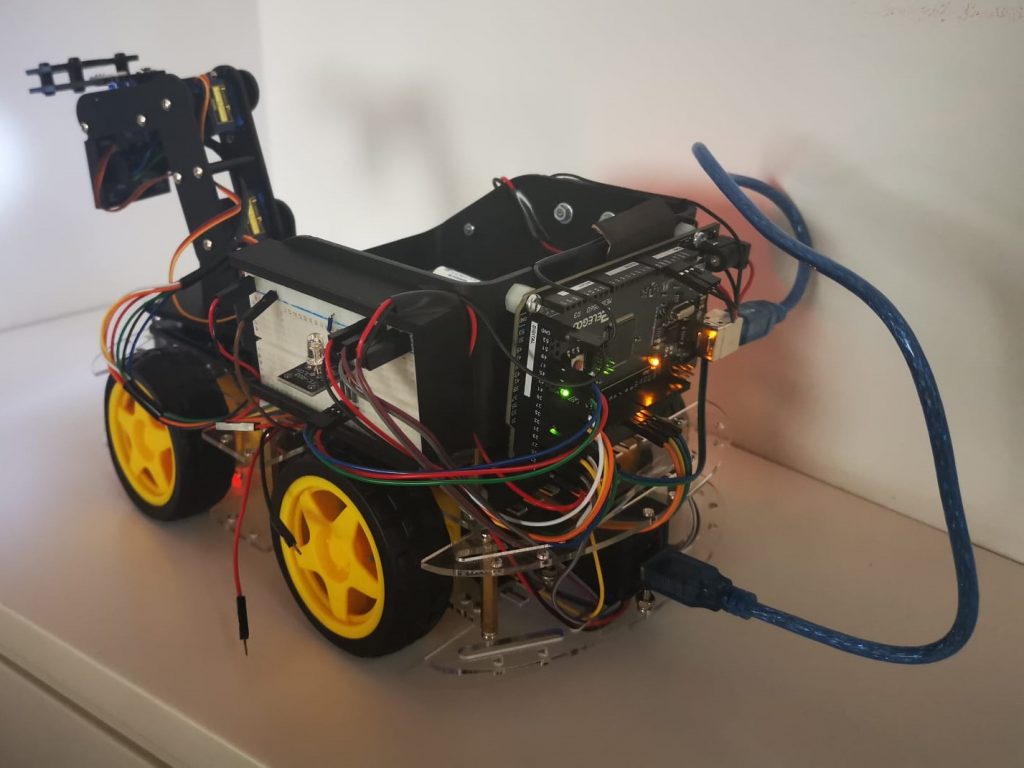
VISTA FRONTAL VISTA TRASERA
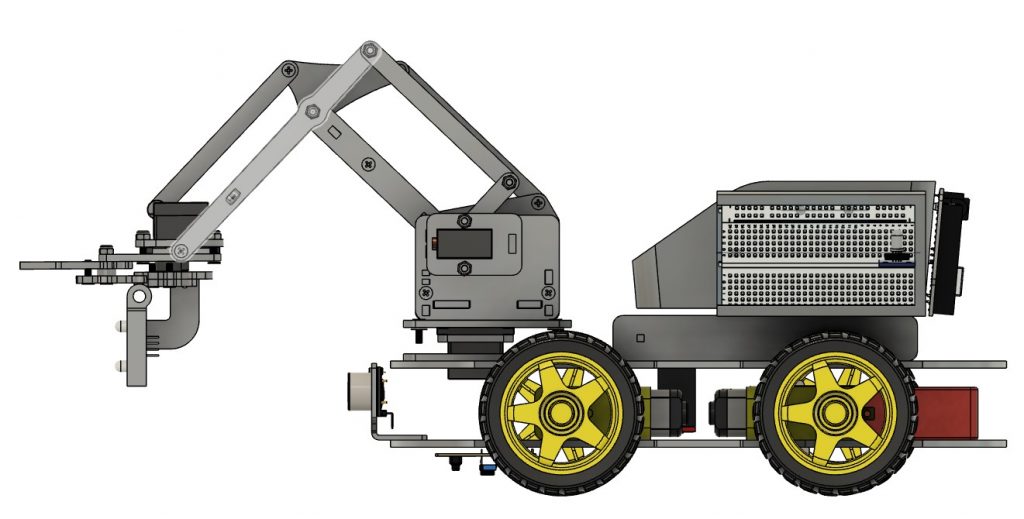
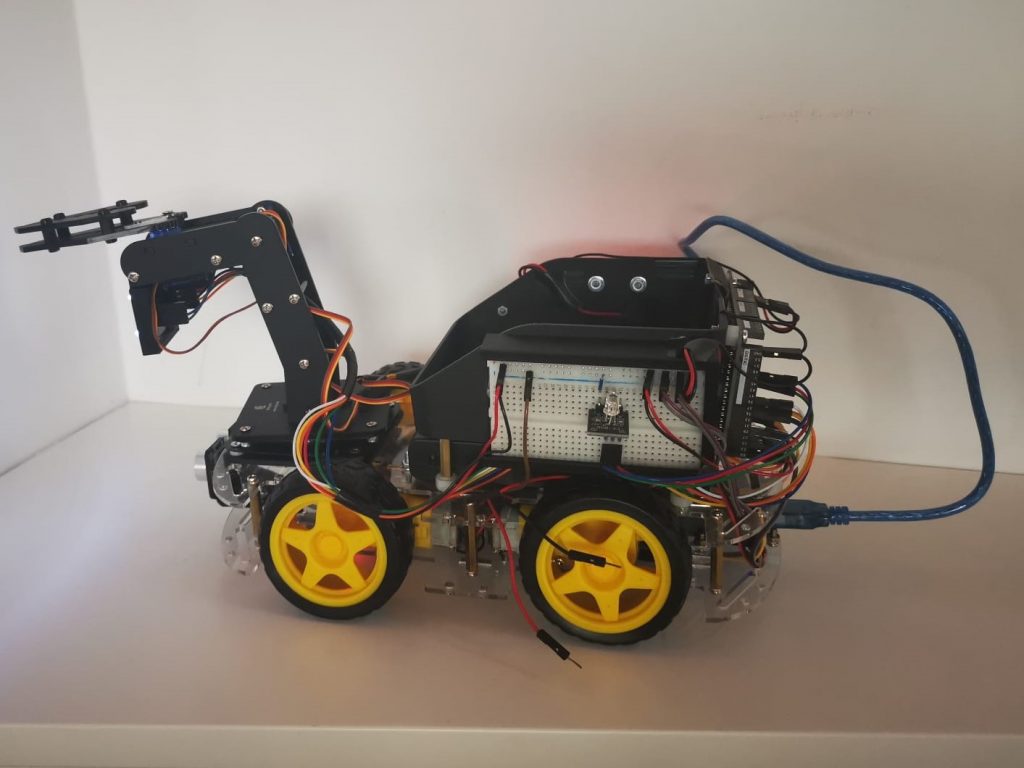
VISTA LATERAL IZQUIERDA
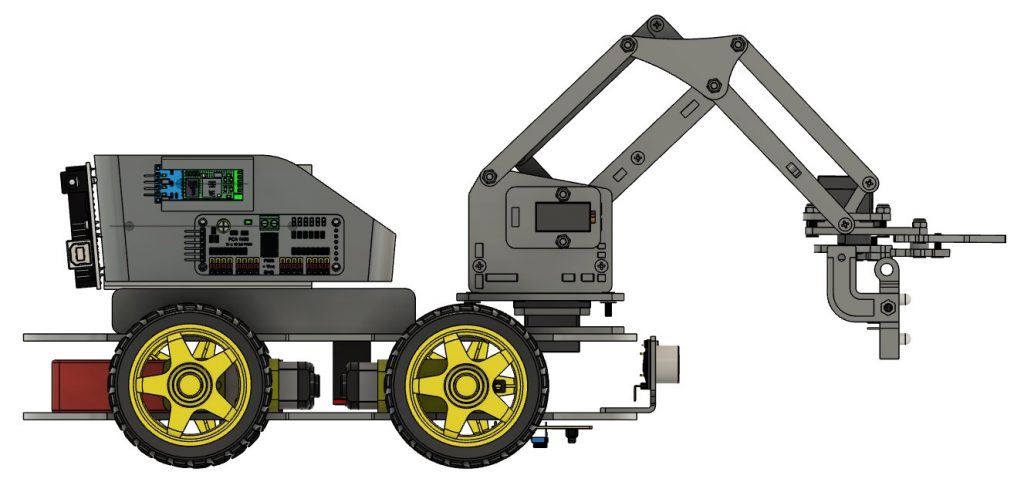
VISTA LATERAL DERECHA
VISTA SUPERIOR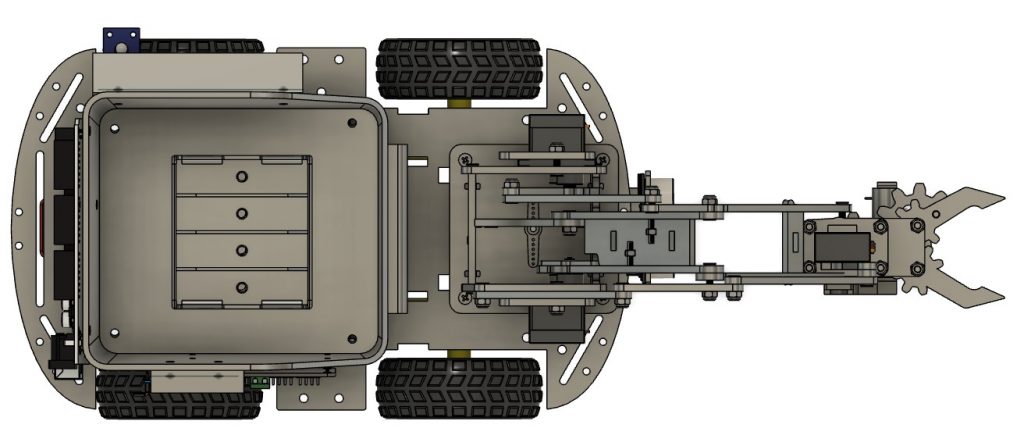
VISTA INTERIOR
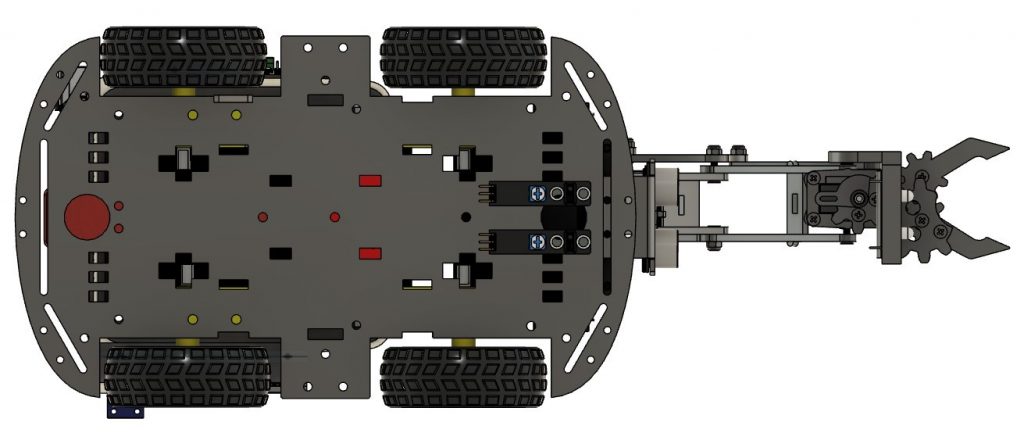
El esquema es un boceto del robot para poder situar las piezas y los sensores.
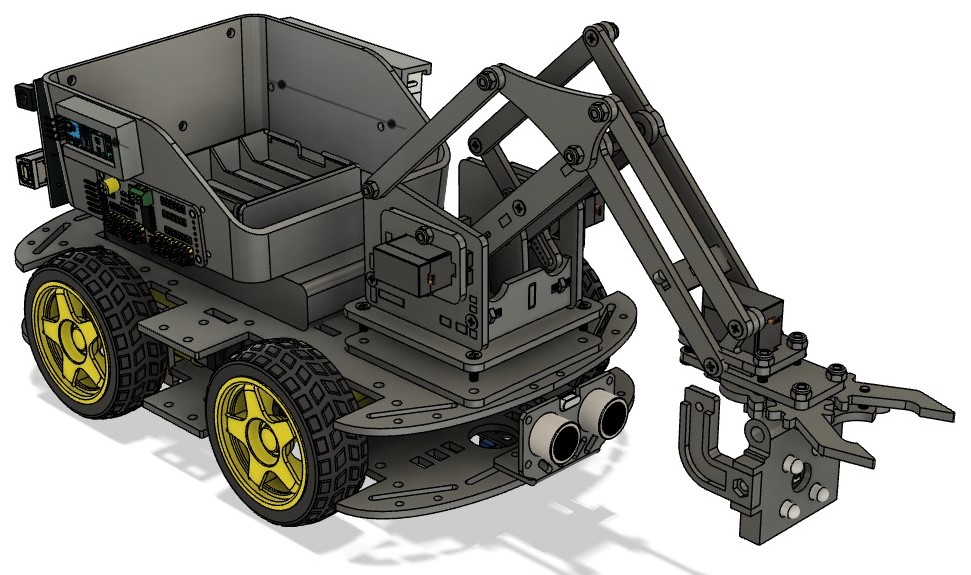
Los componentes del robot en Fusion 360 los he obtenido de varias páginas web, incluido el brazo. He situado cada componente en el lugar donde han sido montados, y así he podido diseñar las piezas que he añadido para la sujeción de los sensores sigue líneas, ultrasonidos, y de color. Y para una mejor organización he diseñado la cubeta donde se depositan los cubos, pero con sujeciones y agujeros para enganchar el Arduino, la protoboard, el driver de los servos y el módulo de Bluetooth.
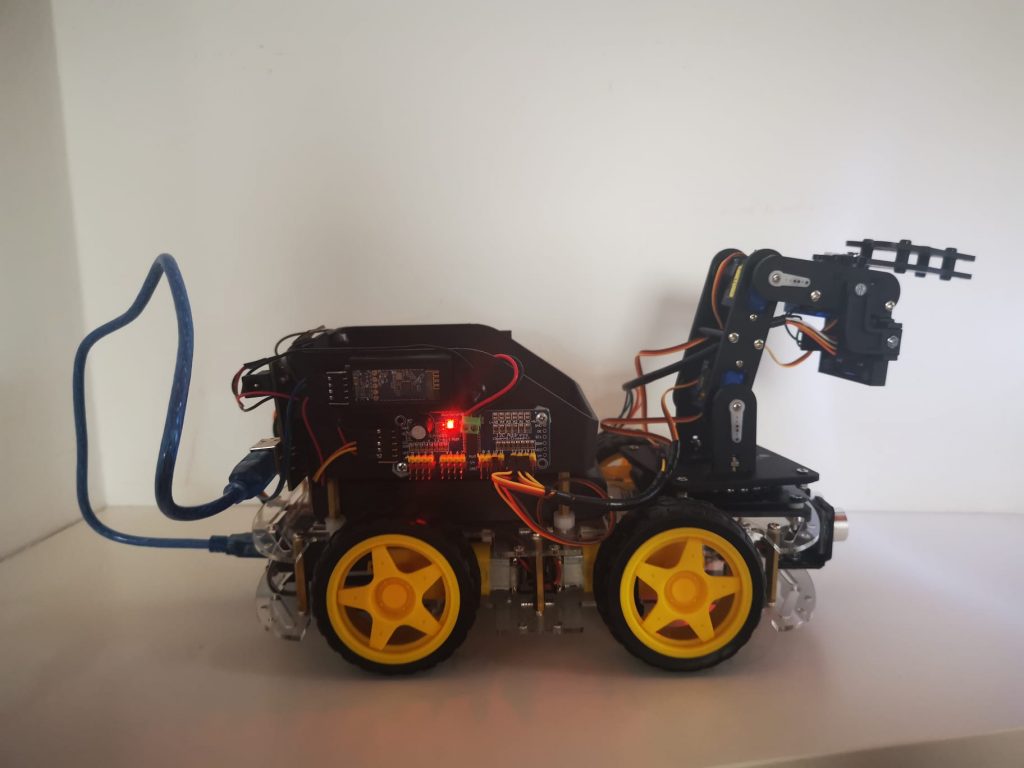
Montaje real

Descripción del robot y ampliaciones
He cogido la base del Smart robot con cuatro motores DC y sus respectivas ruedas. Y le he añadido tres sensores principales, que son: el sensor de ultrasonidos HC-SR04, el sensor para seguir líneas TCRT500 y el módulo de bluetooth HC-06.
También he incluido un brazo para que el robot pueda coger objetos (en este caso solo cilindros), con la ayuda de cuatro microservos.
Y para hacerlo más complejo, he incluido un sensor de color RGB TCS3200, para que una de las aplicaciones del robot sea la detección de colores y la distribución de objetos (en este caso cilindros de tres colores) dependiendo de su color, en distintos lugares. Para comprobar que el robot detecta bien el color de los cubos, he incluido un led RGB.
Lista de materiales
- Motor Smart car (x4)
- Rueda Smart car (x4)
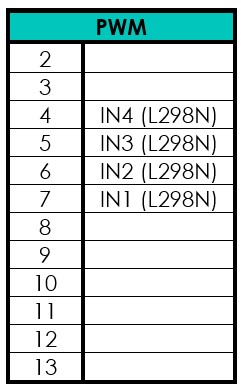
- Driver de motor L298N
- Base Smart car 4 ruedas (parte superior y parte inferior)
- Arduino Mega
- Powerbank 3600mAh USB (5V)
- Caja de Almacenamiento de Batería (12V 8xAA)
- Caja de Almacenamiento de Batería (6V 4xAA)
- Cables Macho-Hembra, Hembra-Hembra, Macho-Macho
- Módulo sigue líneas TCRT500 (x2)
- Sensor ultrasonidos HC-SR04
- Módulo bluetooth HC-06
- Sensor Color RGB TCS3200
- Adeept Kit de modelo de robot DIY 4-DOF brazo robot con mango programable STEAM 4 ejes kit de brazo robótico compatible con Arduino IDE (quitando Joystick y placa Arduino)
- Módulo RGB LED KY-016
- Mini protoboard
- Impresión de piezas en 3D (cubeta, soporte del sensor ultrasonidos y soporte sensor de color)
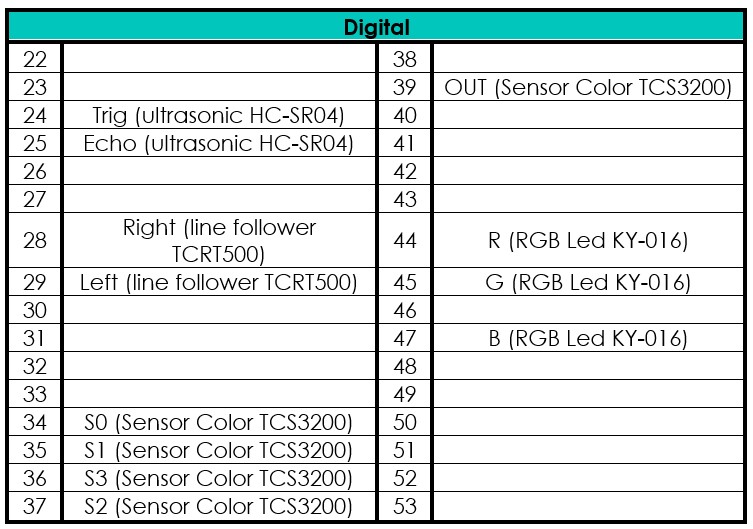
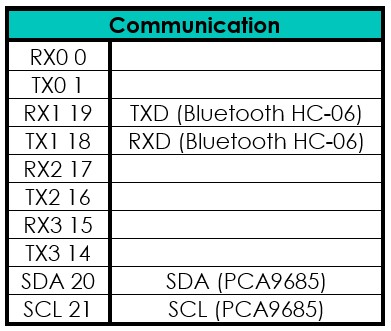
Conexiones
Aplicaciones/Modos del robot
Modo evitar obstáculos
Uso del sensor de ultrasonidos HC-SR04, para la detección de obstáculos.
El robot debe de ser capaz de moverse dentro de un recinto evitando los obstáculos puestos en su camino, mediante el uso de un sensor de ultrasonidos
De normal el robot va hacia delante, pero si encuentra un obstáculo:
- Para, retrocede unos pasos, gira 90º hacia la derecha, y sigue hacia delante.
- Para, retrocede unos pasos, gira 90º hacia la izquierda, y sigue hacia delante.
(Tengo dos funciones, o que gire al mismo lado cada vez que detecta un objeto, o que gire a la izquierda o derecha con la función de random del Arduino)
Modo sigue líneas
Uso del módulo sigue líneas TCRT500, para el seguimiento de una línea negra en el suelo.
El robot debe ser capaz de seguir por sí mismo una línea oscura comparado con la superficie sobre la que está, mediante el uso de un emisor-receptor de infrarrojos.
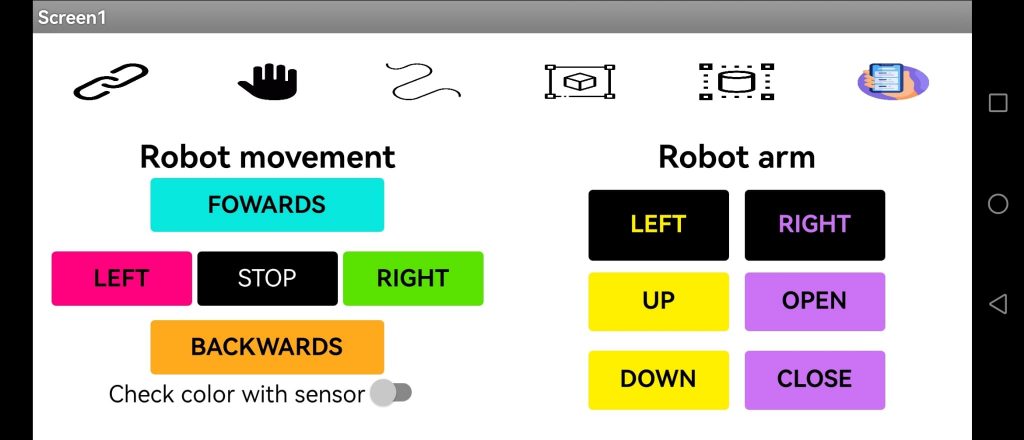
Modo manual
Uso del módulo bluetooth HC-06 y de una aplicación en el móvil, para dirigir los movimientos del robot.
En este modo, dispondremos de una aplicación móvil que mediante bluetooth podrá enviar comandos al sensor de bluetooth HC-06, para así poder dirigir al robot.
Movimientos:
- Moverse hacia delante
- Moverse hacia atrás
- Girara hacia la derecha
- Girar hacia la izquierda
- Abrir y cerrar gripper
- Girar brazo a derecha o izquierda
- Subir o bajar brazo
- Detectar el color del objeto que tiene delante
Modo sigue líneas con obstáculo
- El robot sigue la línea (con el sensor TCRT5000), y al encontrarse un obstáculo se para (con el sensor de ultrasonidos HC-SR04).
- Una vez detectado el obstaculo, dependiendo de la mínima distancia puesta para que se pare al encontrar un objeto, el robot se mueve un poco hacia delante o no, para coger el objeto.
- El robot coge el cilindro y lo levanta mediante los movimientos programados del brazo (la pinza se acciona con un servo SG90, luego hay dos servos del mismo tipo para levantar la pieza y un último servo MG90S, con más fuerza, para el giro del brazo).
- Tras coger el cilindro, detecta (con el sensor de color RGB TCS3200) el color del cilindro (color: rojo, verde o azul), y mediante el Módulo RGB LED muestra el color detectado.
- Una vez cogido el cilindro, el robot lo aparta de su camino.
- sí es rojo, el robot deja el cilindro a la derecha
- sí es verde, el robot deja el cilindro a la izquierda
- sí es azul, el robot se guarda el cilindro en la cubeta
- El robot volverá a su posición anterior, a la descarga del cilindro, y seguirá con su camino.
Esquema de la interfaz de usuario de la aplicación móvil
Videos
Ha habido problemas con la alimentación del driver de los motores DC, porque los drivers suelen ser alimentados con voltajes de 6 a 12V, pero al conectar cuatro motores en vez de dos, es necesario alimentar el motor con 12V. Tras la búsqueda de baterías para la alimentación de 12V, la mayoría son: baterías de litio de gran peso, pilas de litio que necesitan cargadores específicos para esas pilas, pilas AA utilizadas normalmente por todos, pero se que gastan muy rápido, y la última posibilidad es alimentación por enchufe. Es por esto que los videos están repetidos. Para cada modo está el video con pilas AA, y otro video con la alimentación por enchufe.
Modo evitar obstáculos
Con pilas y solo giro a la derecha
Conectado a la luz y solo giro a la derecha
Conectado a la luz y con giro aleatorio
Modo sigue líneas
Con pilas
Conectado a la luz
Modo manual
Modo sigue líneas con obstáculo
Páginas usadas para el montaje y la busqueda de código
Sensor de ultrasonidos HC-SR04
https://tecnopatafisica.com/tecno3eso/teoria/robotica/78-arduinorobot
Módulo Sigue líneas TCRT500
https://robu.in/how-to-make-a-line-follower-robot-using-arduino-connection-code/
Motor DC con driver L298N
https://tecnopatafisica.com/tecno3eso/teoria/robotica/78-arduinorobot
https://robu.in/how-to-make-a-line-follower-robot-using-arduino-connection-code/
Microservo SG90 con controlador de servos PCA9685
https://srituhobby.com/how-to-assemble-and-control-a-robot-arm-with-an-arduino/
https://github.com/Cokoino/CKK0006
Sensor Color RGB TCS3200
Módulo bluetooth HC-06
https://docs.arduino.cc/learn/built-in-libraries/software-serial#softwareserial
Descargas
Autora
Salma Sotos Llopis[:][:]