

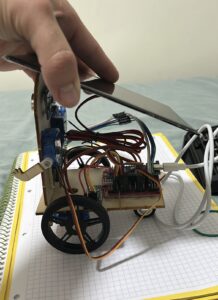
Componentes
Se han usado los siguientes componentes para su montaje:
- Corte laser en lamina de madera
- Lego technic
- Arduino Nano v3.0
- I/O Extension Shield para Arduino Nano
- Mini-USB cable (30cm)
- Powerbank 3600mAh USB
- Micro servo FS90R ruedas (x2)
- Micro servo SG90 (x2)
- Rueda loca
- Sensor ultrasónico HC-SR04
- Buzzer KY-006
- LED Matrix 8×8 max7219
- Bluetooth HM-10
- Cables DuPont
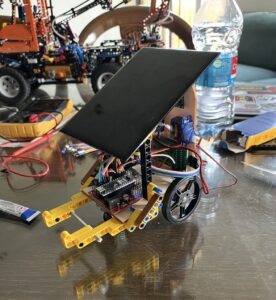
- Placa solar 6V 320mA
- Baterias de litio 3.7V 3400mAh (x2)
- Modulo cargador TP4056
- Booster DC-DC MT3608
Aplicación móvil
Para el control remoto del robot, he decido usar la aplicación móvil Dabble. Ya que esta está disponible para IOS y módulo bluetooth HM-10. Además resulta muy sencilla de programar en arduino, ya que incluye una librería en el programa de Arduino.

- Conectar y desconectar Bluetooth: Mediante el simbolito de enchufe arriba a la izquierda seleccionamos el Bluetooth.
- Botones: Cuando se pulsan, se realizan algunos de estas acciones:
- Las flechas de la izquierda mueven el robot hacia adelante, atras, izquierda o derecha.
- El boton start activa el modo interactivo, es decir los botones a mano derecha. El boton select los desactiva.
- El triangulo y la cruz levantan y bajan los brazos, respectivamente.
- El cuadrado actica/desactiva el modo patrulla, que es el modo de movimiento autónomo.
- El circulo está programado para hacer sonar una melodía y mostrar diferentes figuras en la atriz led.
- Modo autónomo: El minion avanza mostrando una flecha. Cuando el sesnor ultrasónico detecta un objeto a menos de 20cm, el minion retrocede y gira hacia un angulo aleatorio, mostrando una cruz y emitiendo un sonido.
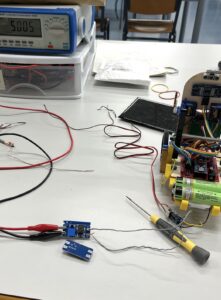
Conexionado del sistema solar
La placa solar entrega un voltaje máximo de 6V, la cual queremos conectar a las baterias de litio de 3,7V conectadas en paralelo. Para ello hacemos uso del módulo cargador TP4056, el cual asegura el correcto funcionamiento de la carga y descarga de esta batería. Conectamos los V+ y V- de la placa al Vin+ y Vin- del módulo. Las salidas del modulo se conectan el B+ y B- a las baterías.
El TP4056 tambien incorpora un puerto USB-C para la carga directa.
Como el arduino funciona con una alimentación de 5V, debemos aumentar el voltaje de las baterías al requerido. Para ello usamos el MT3608. Por tanto conectamos el Vout+ y Vout- del TP4056 al Vin+ y Vin- del MT3608. Este módulo integra un potenciómetro variable para ajustar la salida, la cual deberemos calibrar a 5V.
Con esto obtenemos la alimentación necesaria para el arduino.
Programación
Para la programación del código se ha usado Arduino.
Autor
Simon Stevens
