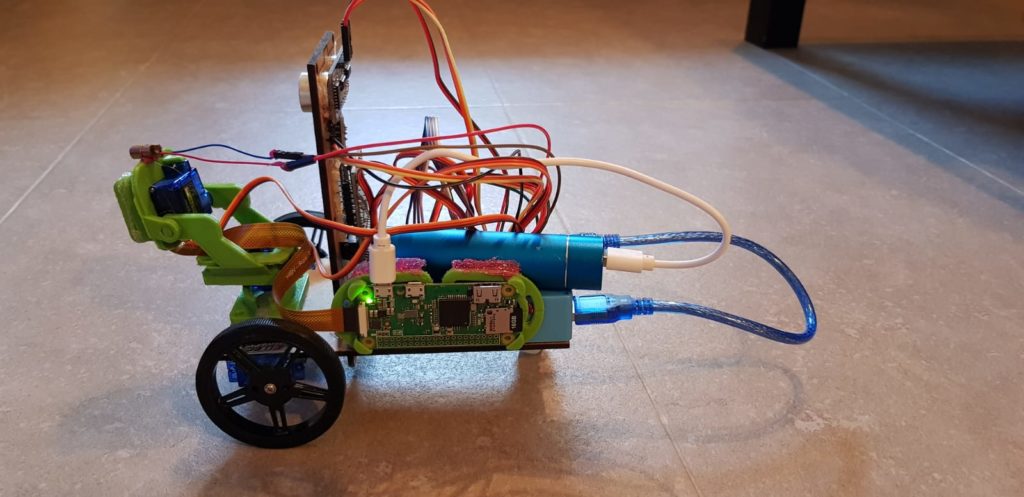
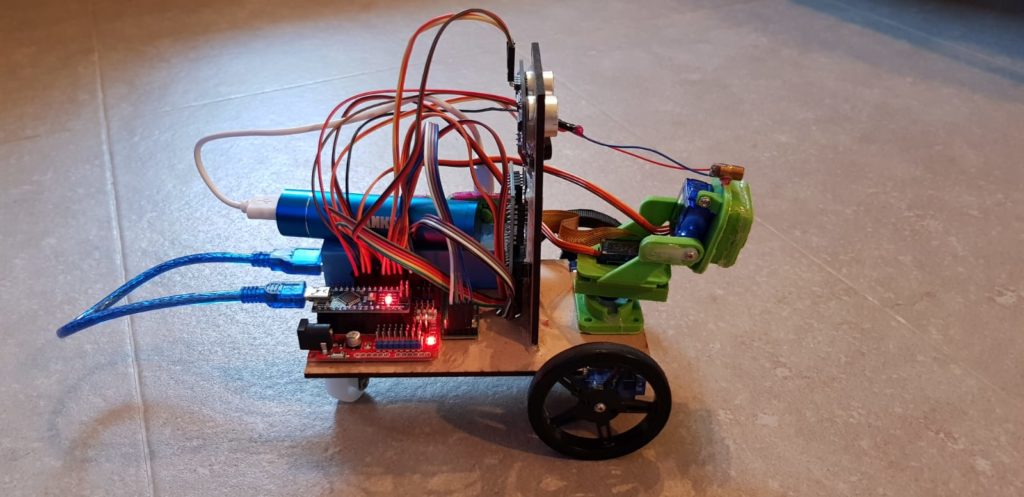
[:es]En esta entrada se va a explicar como se ha desarrollado el robot móvil CloudVision, el cual cuenta con un sistema FPV (First Person View), por el que podremos visualizar en vivo lo que ve el robot a través de su cámara.

Componentes utilizados:
- Arduino Nano + Shield Arduino Nano I/O
- 2x Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido
- 2x Servos SG90
- 2x Servos FS90R
- Bluetooth
- Seguilíneas TCRT5000
- Rueda loca
- 2x Ruedas FS90R
- Matriz de LEDs
- Piezas impresas 3D
- Raspberry Pi Zero W
- Raspberry Pi Camera Module v2
- Módulo laser
Sistema de visión (FPV):
Para crear el sistema de visión se ha optado por la cámara Raspberry Pi Camera Module v2 para capturar la imagen y la Raspberry Pi Zero W para tratar esta señal y enviarla mediante WIFI al receptor (smartphone, tablet, pc, etc).


Se ha escogido un sistema Pan and Tilt para controlar la orientación de la cámara, el cual esta compuesto por dos servos SG90 controlados por Arduino a través de la interfaz de usuario de la app.
Además se ha instalado un láser en la parte superior de la montura de la cámara el cual se activa desde la app.
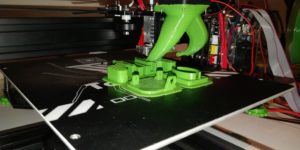
Impresión 3D
Tanto el sistema Pan and Tilt, la caja protectora de la cámara, como el soporte para la Raspberry han sido impresos mediante impresora 3D, ya que de esta forma adaptamos nuestro diseño a las necesidades de espacio de la base de nuestro robot con facilidad.
A continuación pueden descargarse los diseños para cada una de las partes mencionadas. En el caso de ser necesaria alguna modificación en el diseño, puede usarse cualquier programa CAD, en mi caso fue Meshmixer.
Soporte Raspberry:
https://www.thingiverse.com/thing:2221310
Pan and Tilt:
https://www.thingiverse.com/thing:2892903
Caja protectora de la cámara:
https://www.thingiverse.com/thing:1718628
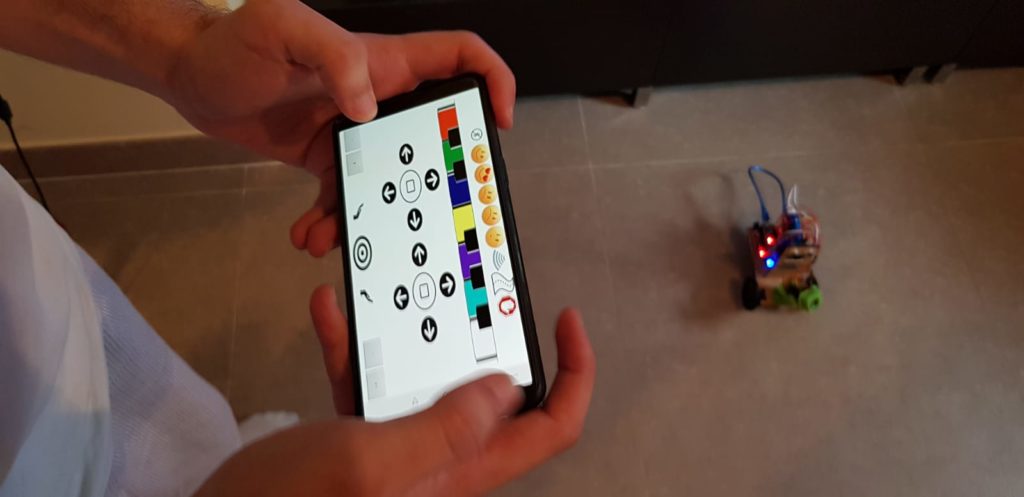
Aplicación Android
Para controlar el robot se ha optado por hacerlo mediante una aplicación Android y un módulo Bluetooth. La aplicación Android se ha desarrollado con la aplicación web App Inventor 2.

Algunas de las funciones a destacar son:
- Evita obstáculos.
- Control de movimiento mediante giroscopio del smartphone.
- Control de la orientación de la cámara y dispara láser.
Fotos

Vídeos
Autor: Vicent Part Soriano[:]