[:es]Esta entrada aborda el desarrollo del robot SuperMarioTank.
Descripción
Esta entrada aborda el desarrollo del robot SuperMarioTank partiendo de su diseño hasta los diferentes modos de actuación que se habilitan.

Diseño 2D
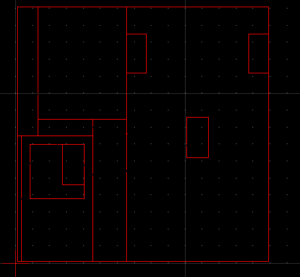
El diseño se realiza con el programa QCAD, aplicación de diseño asistido 2D de licencia abierta. Dado que se trata de un tanque, su diseño básico es bastante sencillo. Se han habilitado unos huecos en la parte trasera a modo de los que incorporan los diseños que poseen pinzas para ubicar sus servos, aunque, en este caso, se utilizan para que suban por ahí los cables de los elementos que están ubicados en la parte inferior de la plataforma (servos continuos y sensor infrarrojo). También se habilita un hueco en la parte central para ubicar el servo de rotación del cañón respecto el eje z. El diseño se exporta en formato .dxf para proceder a su corte por láser.
Componentes
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido KY-006
- Servos SG90 (cañón)
- Servos FS90R (ruedas)
- Módulo Bluetooth HC-05
- Sensor infrarrojo TCRT5000
- Rueda loca
- Ruedas FS90R
- Matriz de LEDs
- Cables dupont hembra-hembra
Montaje
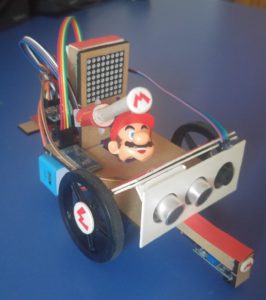
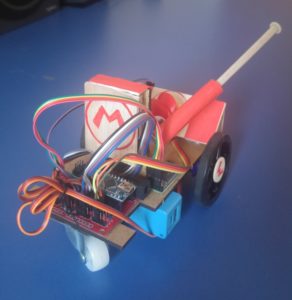
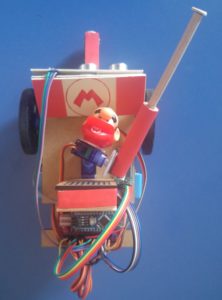
Se mantiene despejada la parte delantera de la plataforma para que el cañón pueda moverse libremente, así como la cabeza de Mario. La elevación de las ruedas permite la ubicación de la batería externa en la parte inferior de la plataforma. Los servos continuos han de estar perfectamente alineados para que pueda ir lo más recto posible cuando así se desee (los servomotores continuos ya aportan cierto error).
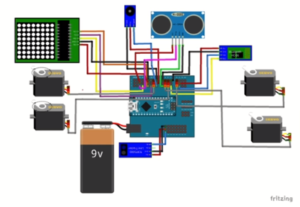
Electrónica
A continuación, se explica a qué pines se ha conectado cada componente:
- Ultrasonido HC-SR04: ECHO (D7), TRIGGER (D13).
- Zumbador de sonido KY-006: (D8)
- Servos SG90 (cañón): Rotación respecto eje z (D6), Rotación respecto eje x (D3)
- Servos FS90R (ruedas): Dcho (D5) e Izq (D9)
- Módulo Bluetooth HC-05: TX (D2), RX (D4).
- Infrarojos TCRT5000: (A0)
- Matriz de LEDs: CS (D10), CLK (D11), DIN (D12).
Modos de funcionamiento
La programación de los distintos modos ha sido desarrollada con la ayuda de Facilino así como directamente en código en el entorno Arduino. Se distinguen tres modos, de los cuales dos son autónomos y uno de control remoto.
•Modo seguidor de líneas
Aplicación autónoma consistente en seguir una línea (en realidad el borde de la línea), para lo que se habilita un circuito con cinta negra sobre suelo claro. La lectura de donde se encuentra se realiza con el sensor infrarrojos y, según lo alejado que se encuentre del borde de la línea, la corrección será mayor o menor, estando en todo momento las dos ruedas funcionando para poder avanzar de manera fluida.
•Modo detector de objeto
Aplicación autónoma en la que el robot se desplaza hasta que encuentra un objeto, momento en el que se para, apunta con el cañón moviéndolo primeramente desde la derecha hasta el centro (servo eje z) y acto seguido hacia arriba (servo eje x). Una vez situado el cañón, empieza una cuenta atrás con la matriz de LEDs y, cuando termina, se reproduce un sonido simulando el disparo con el buzzer y se representa en los LEDs un círculo. Entonces, el cañón vuelve a su posición original, el robot se gira y se dirige hacia otra dirección hasta que vuelve a encontrar otro obstáculo.
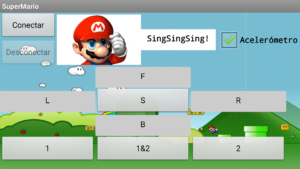
•Modo control remoto
Aplicación controlada través de una aplicación Android desarrollada a partir de App Inventor 2 (MIT). Este modo permite controlar a SuperMarioTank desde unos botones habilitados en la aplicación o inclinando el Smartphone en la dirección en la que se desea que se desplace el robot. Los dos tipos de control se pueden ir alternando mediante el checkeo de la casilla del acelerómetro. Además, se puede reproducir la canción del juego de Super Mario Bros presionando el botón SingSingSing!
Datos del alumno
Joan Mifsud Fons
Máster Universitario en Ingeniería Industrial
Escuela Técnica de Ingeniería Industrial
Universitat Politècnica de València[:]