[:es]El propósito de este proyecto consiste en crear un robot DYOR desde cero, empezando por ensamblarlo pieza por pieza y luego programarlo para que pueda ejecutar tareas específicas.
Introduccion
Nuestro objetivo principal es lograr que el robot desempeñe las funciones de manera precisa, tal y como se han simulado en clase utilizando el programa Coppelia SIM y pudiendo ser controladas por un dispositivo remoto gracias al bluethoot.

Materiales
-Aruino Uno
-Dos baterias 5V
-Ultrasonido HC-SR04
-Zumbador de sonido
-2 motores de continua
-Controlador L298N
-Bluetooth HC-06
-3 Seguilíneas tcrt5000
-Rueda loca
-2 ruedas fijas
-Carcasa de plástico impresa en 3D
Montaje
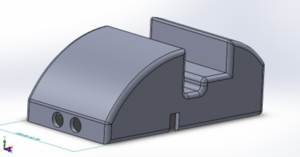
En primer lugar, la carcasa se diseñó con SolidWorks y fue impresa por la UPV Está inspirado en un coche de feria. Respecto a los componentes electrónicos todos fueron comprados. El montaje primero se realizó sobre una tabla de madera y posteriormente fue puesta la carcasa.
Los motores están conectados con una batería de 5V mientras que la placa Arduino y el resto de los sensores con otros 5V.
Modo manual
Mediante la aplicación diseñada en App Inventor, se ha podido realizar un control manual del robot mediante botones que enviarán un número por el canal serie y que, dependiendo de este, el robot realizará un movimiento diferente. Además, desde la aplicación también puedes elegir la música que suene y elegir el modo de funcionamiento.
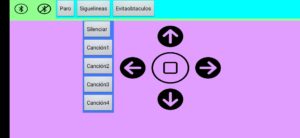

Diagrama de bloques de la aplicación
Canciones
Respecto a las melodías de las canciones, el código y los vectores de estas fueron proporcionados gracias a la web facilinio y a su biblioteca de canciones ya preestablecidas. Además, añadí algunos soniditos más para cuando cambias el modo de funcionamiento desde la aplicación.
Modo evitaobstáculos
Mediante el uso de un sensor sonar colocado en la parte delantera, el robot podrá detectar los obstáculos utilizando la mecánica del rebote de las ondas del ultrasonido. Dependiendo de la distancia, realizará 3 tipos de movimientos diferentes, si la distancia es menos a 30 cm, el robot avanzará a una velocidad más lenta. Una vez la distancia con el objeto es de 20 cm empezará a girar. Además, se le ha añadido una condición para poder parar el coche en cualquier momento, cuando la distancia con el obstáculo es menor a 4 cm. Así conseguimos que el robot cumpla sus funciones y una extra para poder pararlo en caso de necesitar.

Modo siguelineas
En mi caso el coche tiene en su parte inferior tres sensores TCRT500 colocados en línea. Si el sensor del medio detecta que el robot se encuentra en la línea, el robot continuará avanzando recto. Si uno de los sensores detecta que se ha desviado hacia la izquierda (mide la línea), el robot tomará medidas para corregir su trayectoria hacia la derecha. De manera similar, si uno de los sensores detecta una desviación hacia la derecha, el robot se ajustará hacia la izquierda para volver a la línea.
Conclusiones
En resumen, el proyecto DYOR ha sido una experiencia gratificante donde pude construir mi propio robot desde cero y programarlo para realizar diversas funciones. Aprendí sobre la construcción de robots, el uso de sensores y la programación necesaria para controlar sus movimientos.[:]