[:es]En esta entrada se describe el robot DYOR Dalek, inspirado en unos personajes de la serie de ciencia ficción británica Doctor Who.
Para la asignatura de Robótica Móvil, optativa en el Máster de Ingeniería Industrial de la UPV se nos pidió diseñar y montar un robot utilizando los kits de DYOR. En este caso el diseño está basado en los Daleks, unos personajes de la serie de ciencia ficción británica Doctor Who. El resultado final ha quedado de la siguiente forma:
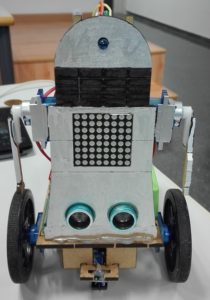

Se ha utilizado el kit DYOR – brazos, con la única adición de una bombilla led azul. Concretamente, para el caso de este robot se han utilizado los siguientes elementos: una placa Arduino mini junto con un shield de expansión Funduino, dos servos continuos (ruedas), dos servos de 180 grados (brazos), un sensor sónar, un sensor infrarrojos, una matriz de leds, un buzzer y un elemento que permite la comunicación vía bluetooth.
El recorte del diseño se ha realizado mediante corte láser. El plano utilizado para el corte se adjunta al final de esta entrada.
La programación se ha hecho tanto mediante código manual, como utilizando la herramienta de generación por bloques que facilita también este pack, el Facilino. Facilino se ha utilizado sobre todo como apoyo para generar código auxiliar necesario para poder controlar y utilizar correctamente la información recogida por los sensores, y como guía de primeros pasos para aprender la sintaxis de los elementos y poder realizar el código de forma manual.
De esta forma se han podido implementar dos modos autónomos y dos modos manuales. Los dos modos autónomos son: un programa que permite seguir el contorno de una línea negra sobre un fondo blanco, y un modo que, cuando el robot se encuentra avanzando hacia delante, cuando detecta un obstáculo, se detiene, reproduce una canción y retrocede y gira ligeramente antes de continuar avanzando. Estos modos pueden verse en funcionamiento en los vídeos que aparecen a continuación:
De forma adicional se añadieron al programa dos modos manuales que permitían controlar el robot de forma remota a través de una aplicación de móvil para Android. Esta aplicación y el robot se comunican a través del Bluetooth. En estos dos modos se puede controlar el movimiento del robot a través de botones y mediante el acelerómetro de nuestro teléfono móvil. En la primera de las dos, además, también se puede reproducir música, levantar los brazos, escribir un mensaje en la matriz de leds y encender y/o apagar la bombilla. La aplicación a su vez permite también lanzar los dos modos autónomos explicados anteriormente. La apariencia de la aplicación es la siguiente:


También tendríamos la pantalla de control del acelerómetro en la que se muestra una pelota que indica la dirección que le hemos mandado al robot (avance, derecha, izquierda, atrás o centro-parada)
También tenemos en la pantalla principal la opción de reproducir sonidos desde nuestro dispositivo móvil. Estos sonidos se encuentran en los botones representados por imágenes de la parte de arriba de la aplicación y que nos permiten hacer sonar tanto la pistola como la célebre frase de los Daleks: «Exerminate!».