[:es]Aprende a diseñar un modelo simplificado del módulo de sonido (zumbador) para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar el módulo de sonido (zumbador) para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el hueco necesario para ubicar el sensor en el frontal del robot.
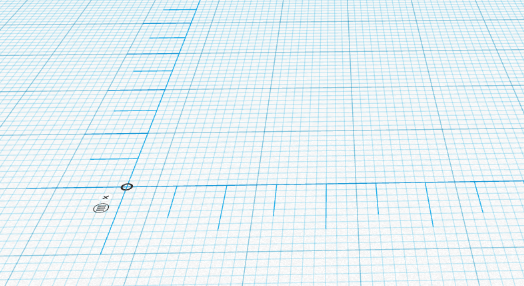
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
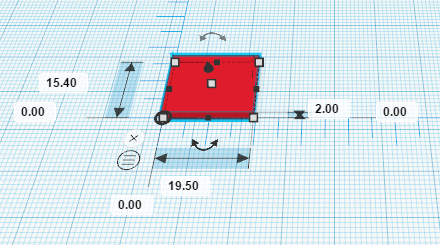
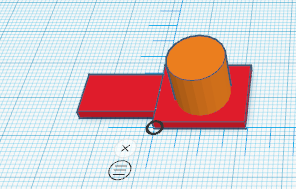
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (19.5,15.4,2), largo, ancho y alto, respectivamente.
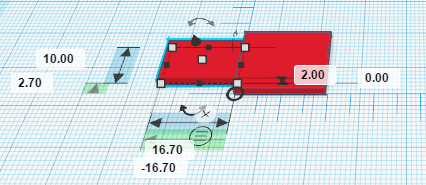
Después crearemos otro cubo para representar el conector. Lo posicionamos en la coordenada (-16.7,2.7,0) con dimensiones (16.7,10,2).
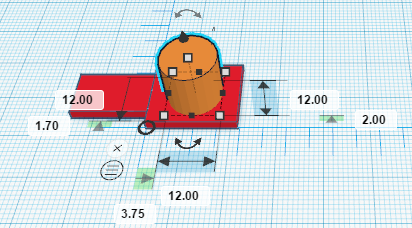
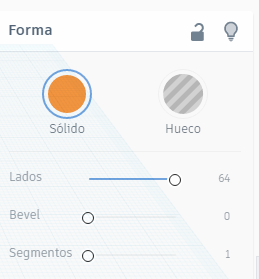
Finalmente creamos un cilindro en la posición (3.75,1.7,2) de dimensiones (12,12,12) y seleccionamos 64 lados en las propiedades del cilindro.
Aquí podéis descargar el fichero STL con la solución:
 [:en]Aprende a diseñar un modelo simplificado del módulo de sonido (zumbador) para tu robot DYOR.
[:en]Aprende a diseñar un modelo simplificado del módulo de sonido (zumbador) para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar el módulo de sonido (zumbador) para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el hueco necesario para ubicar el sensor en el frontal del robot.
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (19.5,15.4,2), largo, ancho y alto, respectivamente.
Después crearemos otro cubo para representar el conector. Lo posicionamos en la coordenada (-16.7,2.7,0) con dimensiones (16.7,10,2).
Finalmente creamos un cilindro en la posición (3.75,1.7,2) de dimensiones (12,12,12) y seleccionamos 64 lados en las propiedades del cilindro.
Aquí podéis descargar el fichero STL con la solución:
[:]