[:es]Aprende a diseñar un modelo simplificado de la tarjeta de expansión I/O de Arduino Nano para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar la tarjeta de expansión I/O de Arduino Nano para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el sólido necesario para determinar la posición correcta de la tarjeta sobre la base del robot.
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
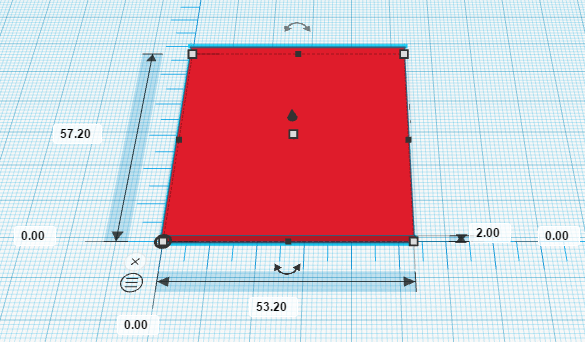
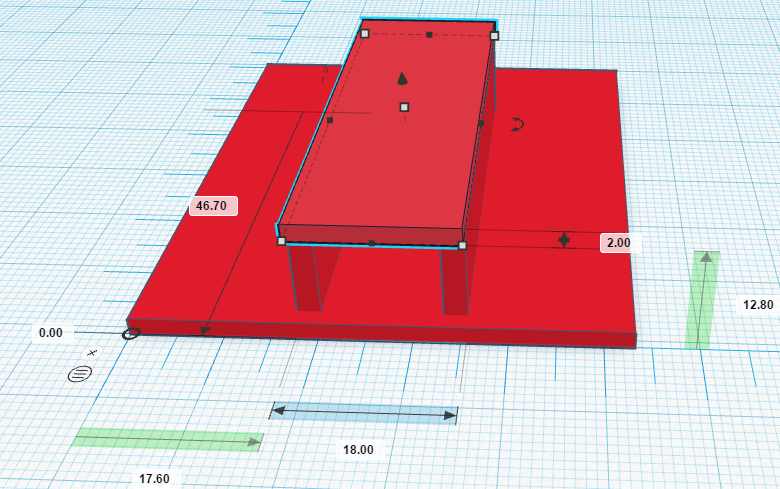
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (53.2,57.2,2), largo, ancho y alto, respectivamente.
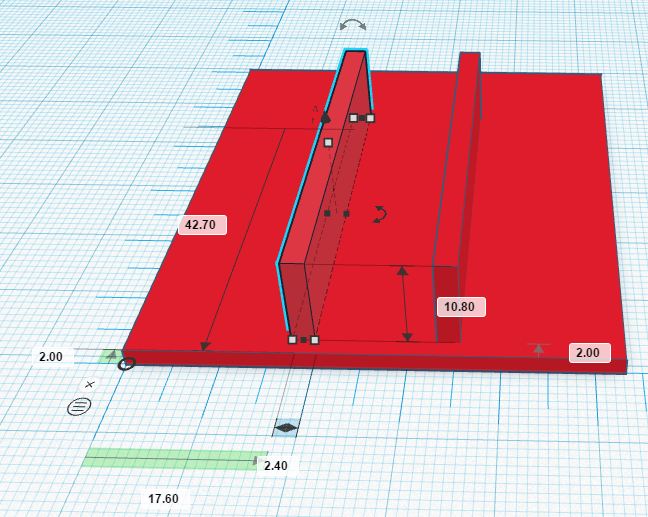
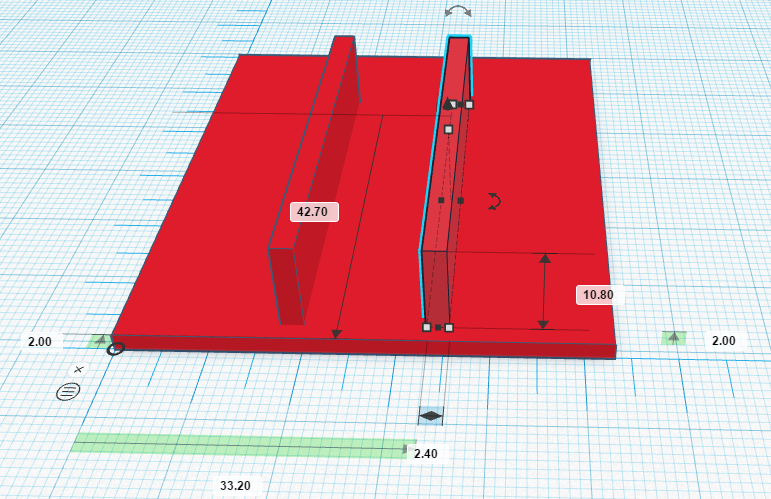
Ahora crearemos el zócalo izquierdo para colocar Arduino Nano. Es un cubo de dimensiones (2.4,10.8,42.7) en la posición (17.6,2,2). Después crearemos el zócalo derecho, con las mismas dimensiones en la posición (33.2,2,2).
Finalmente creamos un cubo para representar a Arduino Nano con dimensiones (18,46.7,2) en la posición (17.6,0,12.8).
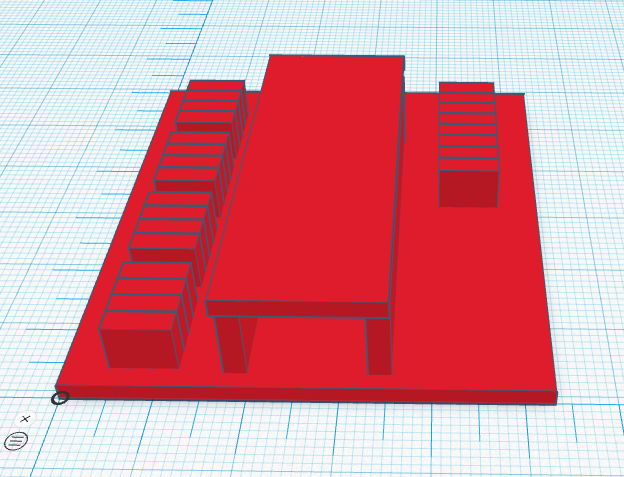
De forma opcional podéis crear los pines de conexión de las entradas y salidas digitales. Aquí debéis de considerar el hecho de que los componentes en los circuitos electrónicos están normalmente separados en pulgadas (1 pulgada = 2.54mm) y por tanto debemos respetar esa separación para el posicionamiento de los componentes. En cualquier caso tampoco es necesario que los valores sean del todo correctos, si no más bien aparentemente correctos.
Empezaremos creando un cubo de dimensiones (7.5,2.54,6) en la posición (5.08,2.54,2). Después debemos «copiar y pegar» utilizando las combinación de teclas CTRL+C y CTRL+V. Veremos que tras el pegado, nos aparece una copia del mismo objeto desplazada a la derecha. Se trata de posicionarla en la misma posición que la pieza anterior, pero incrementando en 2.54mm la coordenada Y. Si hay un hueco, entonces debemos incrementar la coordenada Y en 5.08mm. Os mostramos las posiciones de todos los conectores de las entradas digitales:
AREF -> (5.08,2.54,2)
GND -> (5.08,5.08,2)
13 -> (5.08,7.62,2)
12 -> (5.08,10.16,2)
11 -> (5.08,15.24,2)
10 -> (5.08,17.78,2)
9 -> (5.08,20.32,2)
8 -> (5.08,22.86,2)
7 -> (5.08,27.94,2)
6 -> (5.08,30.48,2)
5 -> (5.08,33.02,2)
4 -> (5.08,35.56,2)
3 -> (5.08,40.64,2)
2 -> (5.08,43.18,2)
1 -> (5.08,45.72,2)
0 -> (5.08,48.26,2)
Para los conectores de los pines analógicos debemos posicionarlos según se indica:
A0 -> (40.62,27.94,2)
A1 -> (40.62,30.48,2)
A2 -> (40.62,33.02,2)
A3 -> (40.62,35.56,2)
A4 -> (40.62,38.1,2)
A5 -> (40.62,40.64,2)
A6 -> (40.62,43.18,2)
A7 -> (40.62,45.72,2)
A8 -> (40.62,48.26,2)
Aquí podéis descargar el fichero STL con la solución:
 [:en]Aprende a diseñar un modelo simplificado de la tarjeta de expansión I/O de Arduino Nano para tu robot DYOR.
[:en]Aprende a diseñar un modelo simplificado de la tarjeta de expansión I/O de Arduino Nano para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar la tarjeta de expansión I/O de Arduino Nano para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el sólido necesario para determinar la posición correcta de la tarjeta sobre la base del robot.
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (53.2,57.2,2), largo, ancho y alto, respectivamente.
Ahora crearemos el zócalo izquierdo para colocar Arduino Nano. Es un cubo de dimensiones (2.4,10.8,42.7) en la posición (17.6,2,2). Después crearemos el zócalo derecho, con las mismas dimensiones en la posición (33.2,2,2).
Finalmente creamos un cubo para representar a Arduino Nano con dimensiones (18,46.7,2) en la posición (17.6,0,12.8).
De forma opcional podéis crear los pines de conexión de las entradas y salidas digitales. Aquí debéis de considerar el hecho de que los componentes en los circuitos electrónicos están normalmente separados en pulgadas (1 pulgada = 2.54mm) y por tanto debemos respetar esa separación para el posicionamiento de los componentes. En cualquier caso tampoco es necesario que los valores sean del todo correctos, si no más bien aparentemente correctos.
Empezaremos creando un cubo de dimensiones (7.5,2.54,6) en la posición (5.08,2.54,2). Después debemos «copiar y pegar» utilizando las combinación de teclas CTRL+C y CTRL+V. Veremos que tras el pegado, nos aparece una copia del mismo objeto desplazada a la derecha. Se trata de posicionarla en la misma posición que la pieza anterior, pero incrementando en 2.54mm la coordenada Y. Si hay un hueco, entonces debemos incrementar la coordenada Y en 5.08mm. Os mostramos las posiciones de todos los conectores de las entradas digitales:
AREF -> (5.08,2.54,2)
GND -> (5.08,5.08,2)
13 -> (5.08,7.62,2)
12 -> (5.08,10.16,2)
11 -> (5.08,15.24,2)
10 -> (5.08,17.78,2)
9 -> (5.08,20.32,2)
8 -> (5.08,22.86,2)
7 -> (5.08,27.94,2)
6 -> (5.08,30.48,2)
5 -> (5.08,33.02,2)
4 -> (5.08,35.56,2)
3 -> (5.08,40.64,2)
2 -> (5.08,43.18,2)
1 -> (5.08,45.72,2)
0 -> (5.08,48.26,2)
Para los conectores de los pines analógicos debemos posicionarlos según se indica:
A0 -> (40.62,27.94,2)
A1 -> (40.62,30.48,2)
A2 -> (40.62,33.02,2)
A3 -> (40.62,35.56,2)
A4 -> (40.62,38.1,2)
A5 -> (40.62,40.64,2)
A6 -> (40.62,43.18,2)
A7 -> (40.62,45.72,2)
A8 -> (40.62,48.26,2)
Aquí podéis descargar el fichero STL con la solución:
[:]