[:es]Esta entrada muestra un ejemplo de robot DYOR con Arduino Nano y sensores y actuadores electrónicos. Se ha programado con un código basado en Arduino IDE con la ayuda del software Facilino para programación por bloques.
Eduardo Dedos Torcidos
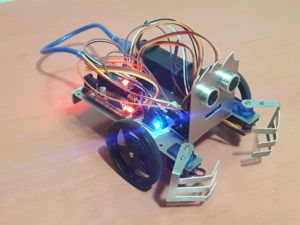
Diseño
Diseño mediante Solidworks y corte por láser de una plancha de aluminio. Consta de soportes y pliegues para los servomotores y de orificios para la sujeción de los distintos componentes electrónicos.
Para este robot en particular se han diseñado dos brazos en forma de garras y por lo tanto, los soportes adecuados.
Componentes electrónicos
- Arduino Nano
- Ultrasonido HC-SR04
- Pantalla OLED
- Bluetooth
- Tira de LEDs
- 2 servomotores continuos FS90R
- 2 servomotores SG90
- Buzzer
- Batería «Powerbank»
Interfaz
Para el programa de control del robot mediante smartphone se ha utilizado AppInventor 2. Esta aplicación consta de un botón con la imagen del símbolo del Bluetooth para conectarse o desconectarse con el robot (centrado arriba). Lo siguientes botones dan acceso a los distintos modos de funcionamiento del robot. De izquierda a derecha los botones corresponde al modo automático, manual y baile que se detallarán a continuación.

Funcionamiento
Modo 1 (Modo Automático). Al pulsar el botón de la izquierda el resto, menos el del Bluetooth, desaparecen. Mediante los sensores ultrasonidos se detecta un objeto que el robot pueda coger con las garras, estas se cierran y lo traslada a un lado con un movimiento preprogramado. Mientras, en la pantalla OLED muestra la imagen de unos dientes y en el momento de dar marcha atrás la tira de LEDs se ilumina en rojo. Para salir de este modo solamente hace falta pulsar de nuevo el botón al igual que el resto de modos.
Modo 2 (Modo Manual). Para este modo la interfaz de usuario cambia una vez pulsado el botón central para mostrar la dirección a la que se dirige el robot y unos sliders para manejar las garras del robot. El funcionamiento de este modo está basado en el acelerómetro de los smartphones.

Modo 3 (Baile). Al pulsar el botón de la derecha el robot gira sobre si mismo mientras en el buzzer suena una canción y en la tira de leds se observa el efecto «coche fantástico».
Vídeo
[:]