[:es]En esta entrada se muestra el diseño, fabricación y funcionamiento del modelo de robot DYOR con palas realizado con chapa metálica.
DYOR Palas
Diseño y fabricación
Para fabricar este modelo se han empleado los ficheros de Solidworks disponibles en el repositorio de GitHub de DYOR.
https://github.com/roboticafacil/dyor
Las piezas se han enviado a una empresa de corte por láser para realizarlas en chapa metálica.
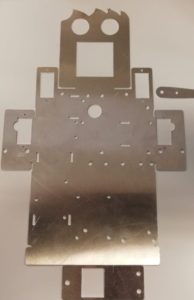
Una vez recibidas las piezas se ha procedido a plegarlas para poder realizar el montaje.
Componentes electrónicos
- Arduino Nano v3.0 con cable USB
- Placa de expansión de E/S
- 2 Microservos FS90R (de rotación continua) para las ruedas
- 2 Microservos SG90 (de posición) para las palas
- Módulo de seguimiento de línea con sensor infrarrojo TCRT5000
- Sensor de ultrasonidos para medir distancias HC-SR04
- Matriz de LEDs 8×8 (max7219)
- Módulo bluetooth HC-06
- Zumbador de sonido KY-006
- Batería de alimentación (powerbank) USB
- Rueda loca
- 2 ruedas para los FS90R
- Cables Hembra-Hembra DuPont
Montaje
Para el conexionado de los pines se ha seguido la siguiente propuesta:
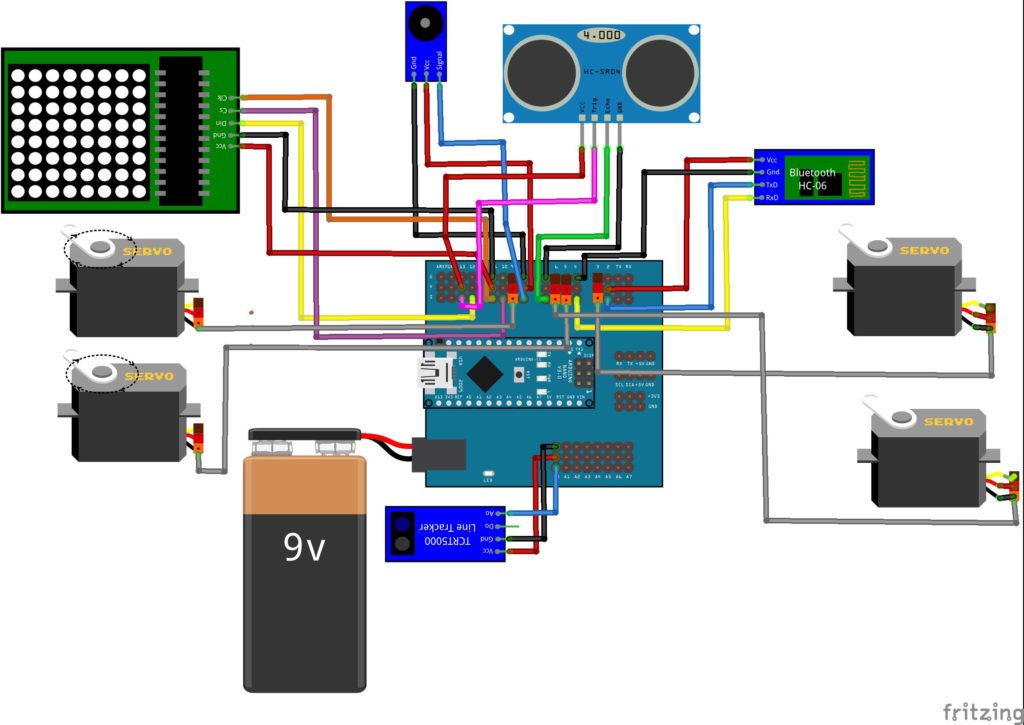
- Bluetooth: TX (D2), RX (D4).
- Servos de rotación continua: Izquierdo (D9), derecho (D5).
- Servos SG90: Izquierda (D6), Derecha (D3).
- Matriz de LEDS: CS (D10), CLK (D11), DIN (D12).
- Ultrasonidos: ECHO (D7), TRIGGER (D13).
- Zumbador: D8.
- Seguilíneas: A0
Programación
Para la programación se ha empleado el software de programación por bloques Facilino, lo que ha permitido desarrollar el código de una forma rápida y sencilla.
Aplicación Android
Se ha desarrollado empleando AppInventor2. La aplicación permite conectar el móvil con el robot a través de bluetooth.De esta forma, se puede controlar el robot para realizar las siguientes acciones:
- Control remoto mediante botones
- Control remoto mediante acelerómetro
- Modo seguilíneas
- Modo evita obstáculos
- Mover las palas
A continuación se incluye una captura de la interfaz:

Fotos y vídeos

Autor
Antonio García Garví
Grado en Ingeniería Electrónica Industrial y Automática
[:]