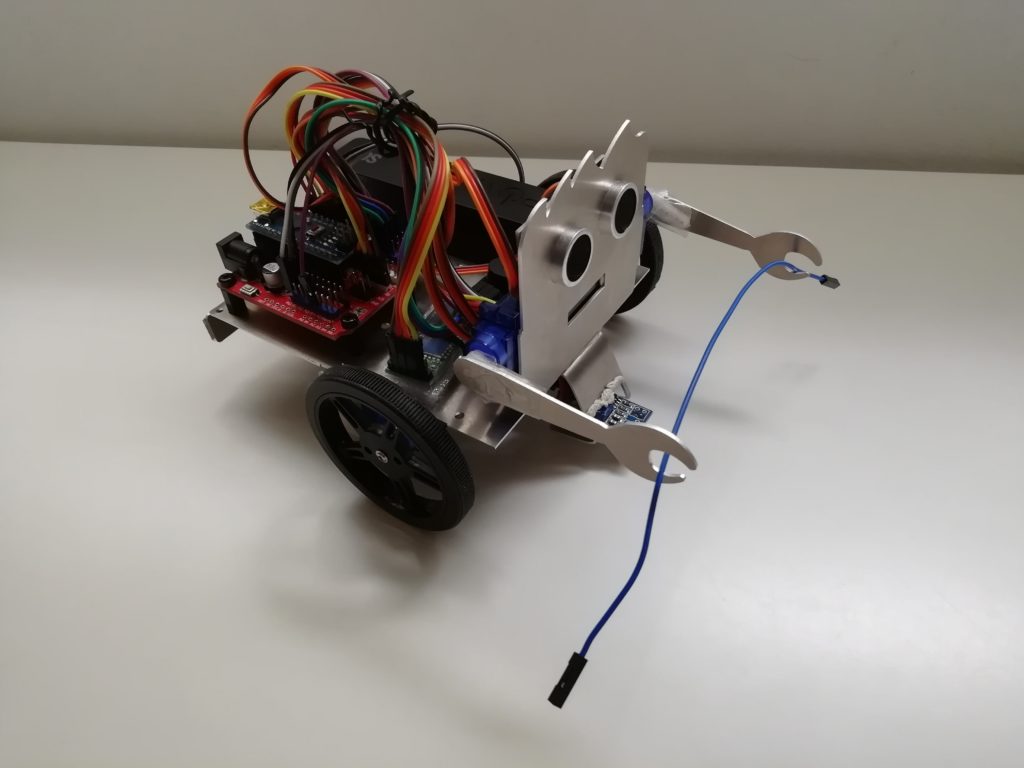
[:es]Feliciano es un robot transportador de cables muy simpático.
Diseño y fabricación
Para diseñar este robot, se ha partido de los ficheros de Solidworks disponibles en el repositorio de GitHub de DYOR.
https://github.com/roboticafacil/dyor
En principio, se había elaborado otro diseño más complejo, basado en la apariencia de un dragón.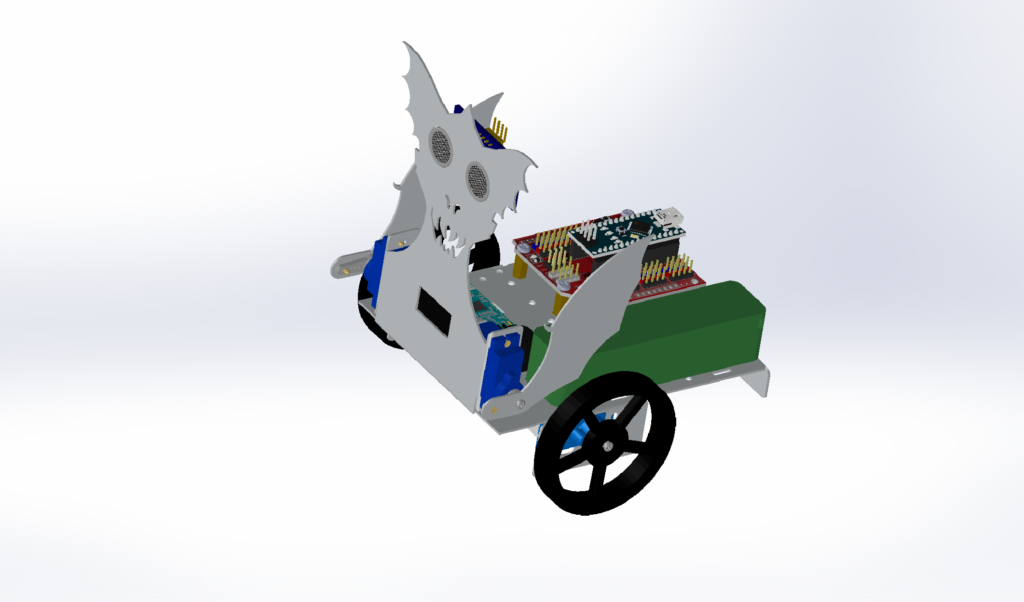
No obstante, no fue posible llevar a cabo la fabricación de estas chapas metálicas debido a su complejidad, por lo que se optó por un diseño más sencillo.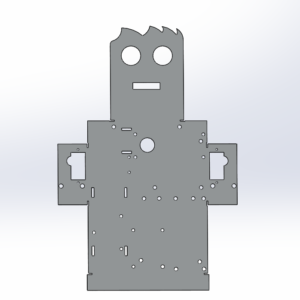
Materiales y componentes
- Arduino Nano
- Placa de expansión de E/S
- 2 Servos de rotación continua FS90R (ruedas)
- 2 Servos SG90 (brazos)
- Sensor de ultrasonidos HC-SR04
- Zumbador KY-006
- Módulo Siguelíneas TCRT5000
- Módulo Bluetooth SPP-C
- Display OLED 128×32 0.91″
- Tira de LEDs trasera
- Powerbank
- Cables Dupont H-H 20cm
- Cable USB
- Cuerpo metálico
- 2 Brazos-herramienta metálicos
- 2 Ruedas
- Rueda loca
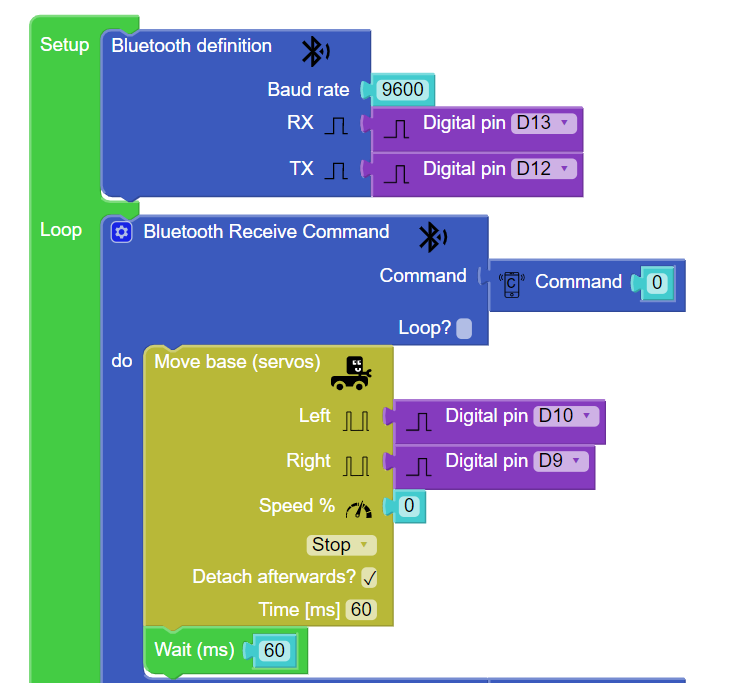
Programación
Para la programación de Feliciano se ha hecho uso del software Facilino (de ahí el nombre del robot), una herramienta de programación por bloques para Arduino. También se ha usado el entorno de desarrollo integrado de Arduino para modificar los programas con mayor detalle.
Por otro lado, se ha programado una aplicación de Android mediante App Inventor 2, también de programación por bloques.

Funcionamiento
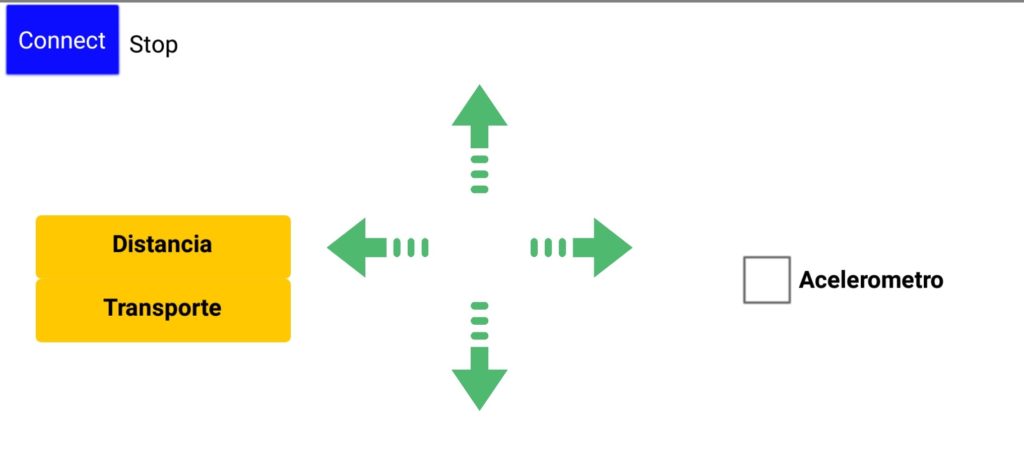
El robot se controla mediante la aplicación para móvil. Desde la propia app se puede mover a Feliciano en cualquier dirección manteniendo pulsadas las flechas. Si se activa la opción, también se puede usar el acelerómetro del móvil para este fin. Desde la pantalla principal de la aplicación se pueden lanzar los 2 programas autónomos que se han programado.
- Programa Distancia. Feliciano hace uso de la información que recibe del sensor de ultrasonidos para mantenerse a una distancia fija (15 cm) del obstáculo móvil que tiene delante. Mientras el robot esté a una distancia distinta de la deseada, se encenderán las luces traseras (verdes si debe avanzar; rojo si debe retroceder). El ajuste de la posición se ha programado con un controlador proporcional con saturación, con entrada igual al incremento de distancia necesario para alcanzar la posición objetivo. Una vez el robot llegue a la distancia especificada, apagará las luces, subirá los brazos y emitirá un sonido por el buzzer. También se pretendía que Feliciano mostrará la distancia por pantalla, pero lamentablemente esta dejó de funcionar de forma repentina mientras se probaba el programa.
- Programa Transporte. Feliciano usa sus brazos-herramienta para transportar cables desde un punto a otro de la fábrica. Existen dos tipos de cable: azul y amarillo, cada uno se debe llevar a una zona diferente. Primero, espera con los brazos levantados en la zona de carga a que le depositen el cable (el color de los LEDs traseros indica el tipo). Una vez hecho, se le pasa la mano por delante (activación del sensor de ultrasonidos) hasta que suene un pitido, lo que indica que empezará a moverse. Una vez haya llegado a la posición de descarga, Feliciano baja los brazos, depositando el cable en la zona correspondiente a su tipo. Finalmente, vuelve la zona de carga y se queda a la espera del siguiente envío. En la siguiente sección, se muestra un vídeo de este proceso.