[:es]En esta entrada se explicará el montaje y funcionamiento de GASH, el «BoatBot».


Materiales
Estos son los materiales que se han utilizado para el montaje:
- Arduino Nano + Shield Arduino Nano I/O
- Pila 9 V
- Ultrasonido HC-SR04
- Zumbador de sonido
- 2 motores de continua
- Controlador L298N
- Bluetooth
- 2 Seguilíneas TCRT5000
- Rueda loca
- 2 ruedas fijas
- 2 Soportes para siguelíneas impresos en 3D
- Carcasa de madera mediante corte laser.
Montaje
La base del robot junto con las tres ruedas y los dos motores se compró todo junto en un pack, el resto de las piezas se compraron por separado (sensores, Arduino, bluetooth…), a excepción de los soportes para los siguelíneas, que se diseñaron con tinkercad y posteriormente la universidad los imprimió, la carcasa, que se diseño en 5 partes mediante tinkercad para posteriormente realizarlas con corte laser, y las velas, que están hechas con una mascarilla y unos palillos de madera encontrados en casa.
El código del robot se programó desde cero mezclando el conocimiento del alumno con la información de internet y sobre todo mediante mucho ensaño y error.
Funcionalidades
El robot se controla mediante conexión bluetooth con un dispositivo móvil, utilizando una aplicación personalizada diseñada con app inventor. Cuando te conectas al robot se visualiza lo siguiente:
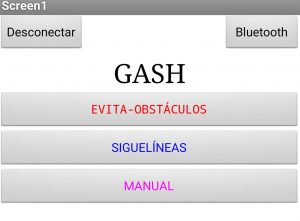
Como se puede observar, hay 3 modos de funcionamiento que se seleccionan mediante los botones superiores y luego tenemos los botones para controlar el robot si nos encontramos en el modo manual.
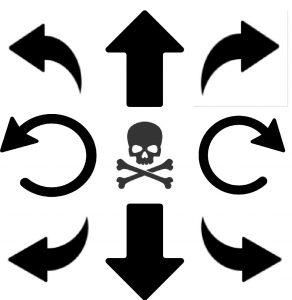
- Modo manual: Dentro de este modo tenemos 9 botones distintos, de esta manera podemos hacer que el robot avance, retroceda, gire sobre sí mismo o que describa trayectorias circulares, haciendo que una de las dos ruedas gire más rápido que la otra. Además, si pulsamos el botón central el robot se parará y comenzará a sonar la canción de “Piratas del Caribe” utilizando el buzzer.
- Modo Evita Obstáculos: Al activarlo, el robot se moverá libremente por el espacio hasta detectar un obstáculo con el sensor de ultrasonidos, cuando lo haga, retrocederá y girará aleatoriamente sobre sí mismo a izquierda o derecha para evitarlo.
- Modo Siguelíneas: En este modo el robot será capaz de seguir un camino marcado con líneas negras en sus dos extremos, girando cuando se encuentre con un lado del camino, o en su defecto también es capaz de mantenerse dentro de un círculo negro.
Vídeos demostrativos
- Manual:
- Sigue-líneas / Sigue-carreteras:
- Evita-obstáculos:
Descarga piezas diseñadas con tinkercad
Autor
Andrés López López
Trabajo realizado para la asignatura de Robótica Móvil.
Grado en ingeniería electrónica industrial y automática.
Escuela Técnica Superior de Ingeniería del Diseño.
Universidad Politécnica de Valencia.[:]