En esta entrada os mostramos el diseño, montaje y programación del robot DYOR inspirado en el famoso coche fantástico «KITT».
Diseño 2D
El diseño de este robot se ha realizado mediante el programa de uso gratuito QCAD. En la siguiente figura se muestra el diseño final del mismo.
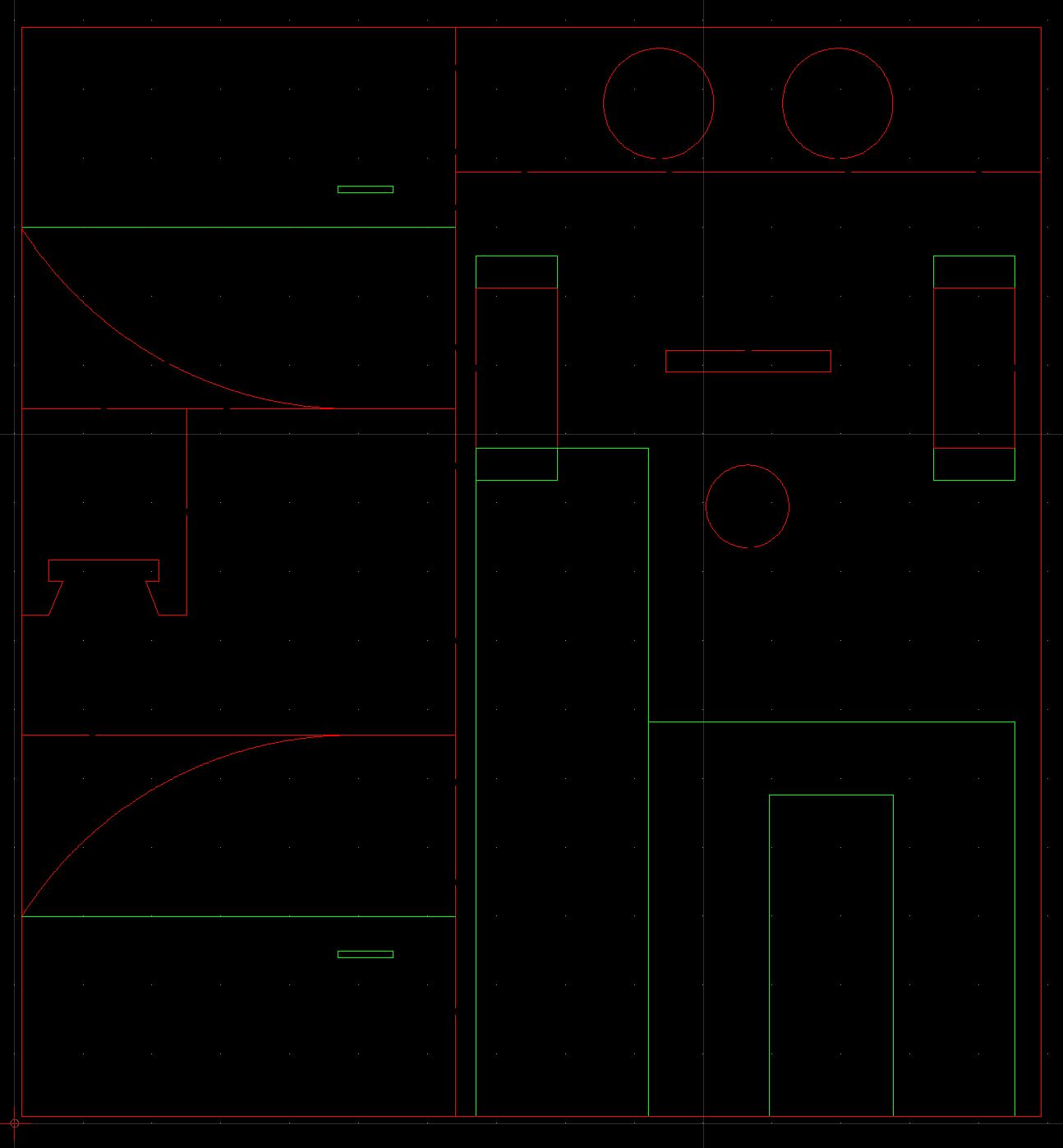
En el diseño se han empleado dos capas diferente, una de ellas representa las aristas que la cortadora láser debe cortar (rojo) y la que debe grabar la forma seleccionada (verde).
Componentes
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido
- Servos SG90
- Servos FS90R
- Bluetooth
- Seguilíneas TCRT5000
- Rueda loca
- Ruedas FS90R
- Matriz de LEDs
- Cables macho-hembra
Conexiones
- Bluetooth: TX (D5), RX (D4).
- Servos de rotación continua: Izquierdo (D10), derecho (D11).
- Servos SG90: Izquierda (D13), Derecha (D12).
- Matriz de LEDS: CS (D8), CLK (D2), DIN (D3).
- Ultrasonidos: ECHO (D7), TRIGGER (D6).
- Zumbador: D9.
- Seguilíneas: A0
Aplicación Móvil
Para poder manejar el robot, es necesario emplear la aplicación móvil diseñada mediante App Inventor 2, la cual posee la siguiente interfaz de usuario.
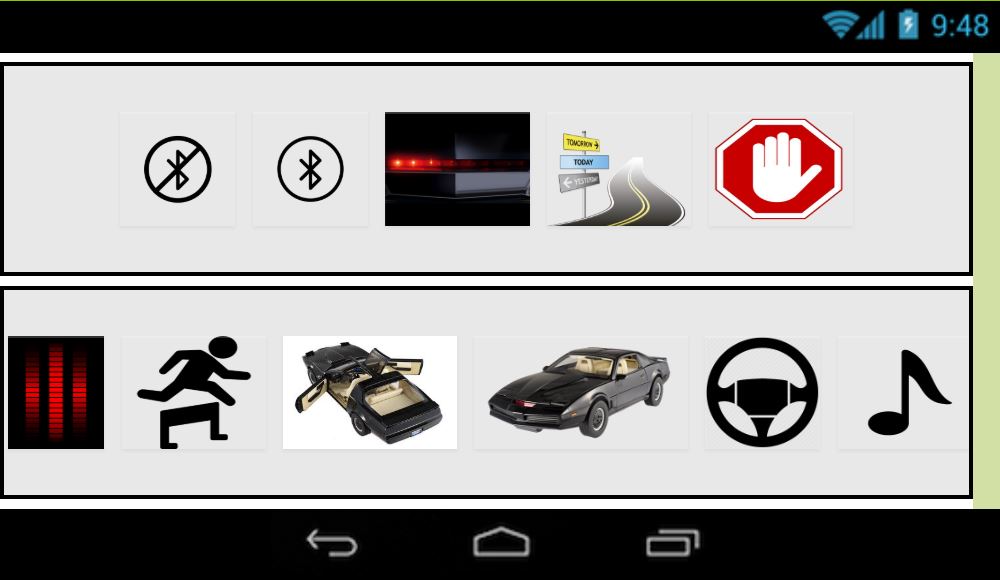
A continuación procedemos a explicar cada uno de elementos de esta interfaz y sus modos de funcionamiento:
- Los dos primeros botones sirven para realizar la desconexión/conexión del bluetooth con el correspondiente robot.
- El tercer botón sirve para accionar la matriz de LEDs para que simule la mítica luz del coche fantástico.
- El siguiente pulsador posee la funcionalidad de ejecutar el programa autónomo correspondiente al seguilíneas.
- Para finalizar con esta fila de pulsadores, nos encontramos con el botón que detiene cualquier modo de funcionamiento y devuelve al robot al estado inicial.
- El primer botón de la segunda fila, posee la funcionalidad de que se muestre por la matriz de LEDs la mítica frase de KITT «Hola Michael».
- Seguidamente nos encontramos con el botón que acciona el segundo programa autónomo, el correspondiente a la evasión de obstáculos.
- Los siguientes dos pulsadores poseen la función de abrir y cerrar las puertas del coche respectivamente.
- El penúltimo pulsador sirve para conducir el vehículo (control remoto) mediante el propio dispositivo móvil mediante el acelerómetro del mismo. Se activa mediante una pulsación sobre el icono y se desactiva realizando una pulsación larga sobre el mismo.
- El último botón sirve para reproducir mediante el altavoz del robot, la mítica canción de la serie del coche fantástico.
Finalmente destacar, que la programación del robot se ha realizado una parte mediante Facilino (programación por bloques) y otra mediante el programa Arduino 1.8.5.
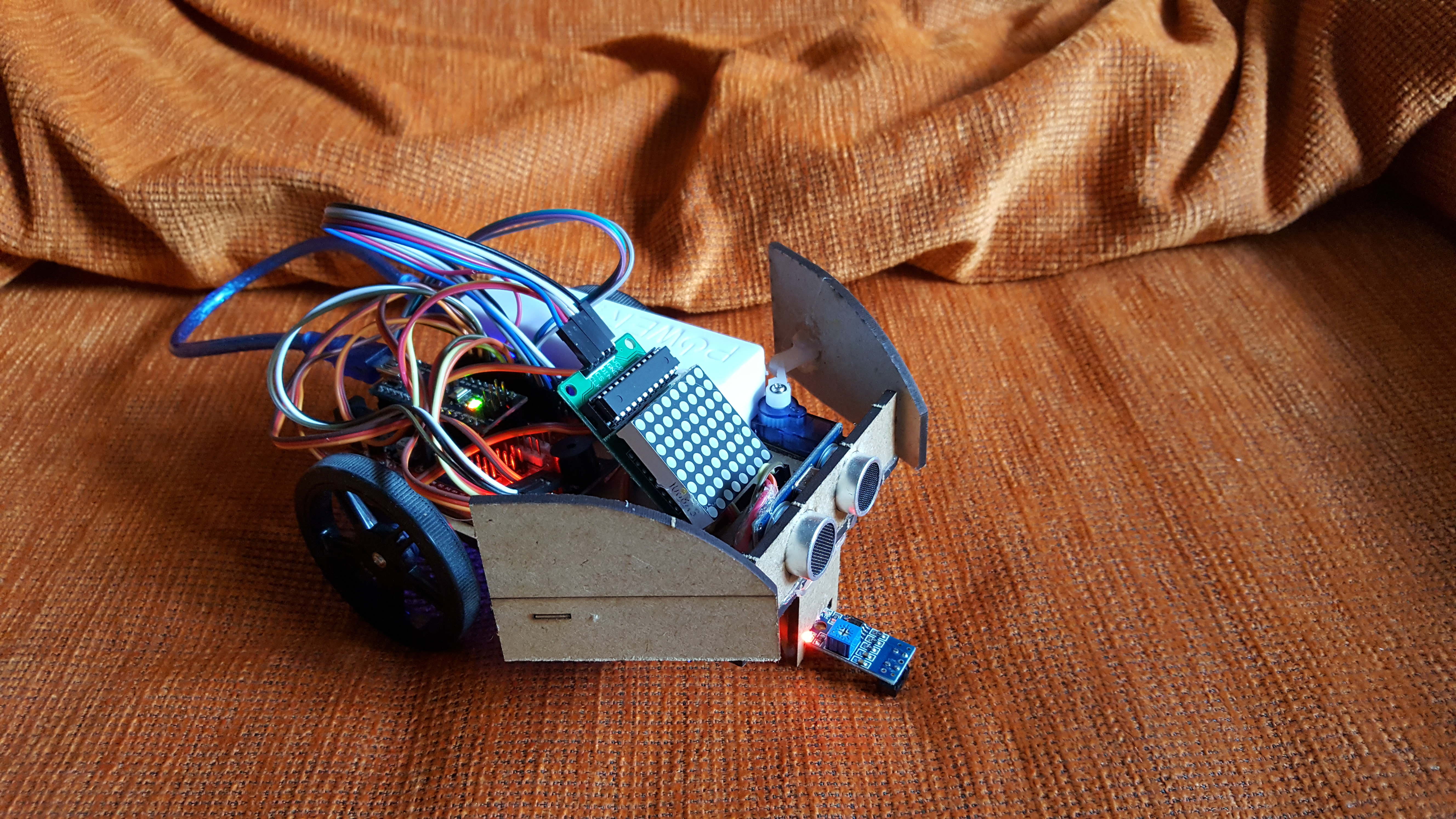
Fotos de KITT



Videos
Autores
Carlos Babiera Sancho
José Ribas Oltra