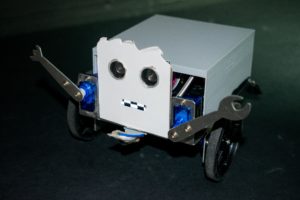
[:es]En esta entrada voy a mostrar mi versión del robot DYOR «Pac-man Ghost».
Pac-man Ghost DYOR
El diseño del robot DYOR está basado en los fantasmas del Pac-man, en el que he intentado plasmar las acciones de los mismos, como por ejemplo, que se vuelvan azules.
Diseño
El diseño inicial de la plancha de metal era este:
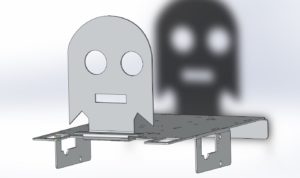
Pero debido a problemas en el corte por láser, se ha tenido que usar el diseño por defecto del DYOR.
Componentes electrónicos
Este robot cuenta con:
- Arduino nano con shield.
- Batería de 5V.
- Dos servos de rotación continua FS90R.
- Dos servos SG90.
- Sensor de ultrasonidos HC-SR04.
- Pantalla OLED.
- Tira de LEDs.
- LED ultravioleta.
- Transistor 2n2222.
- Cableado.
Montaje
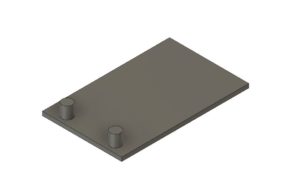
En este diseño, la única cosa añadida por mi, es el LED UV que se usa para iluminar la cara del robot, la cual está recubierta con pintura blanca fluorescente, la cual se ilumina de un color azul, imitando al azul de los fantasmas. Para añadir este LED se ha impreso en 3D una sujeción de plástico en la cual irá el LED, esta sujeción esta enganchada al chasis por debajo de la cabeza. Como este LED necesita más corriente de la que puede dar la salida digital del arduino, se ha conectado a la salida de un transistor 2n2222, el cual, al recibir la señal en el pin de la base conectará el LED directo a la salida de 5V del arduino, este transistor ira debajo del sobarte del LED, adherido con silicona.


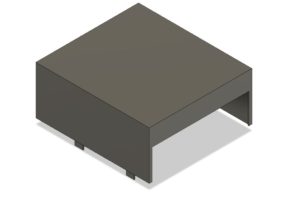
Finalmente, como añadido para el robot, es el diseño de una cubierta que permita ocultar y proteger la electrónica del DYOR
El montaje del robot es muy intuitivo, salvo por algunas cosas:
- La orientación de la pantalla, la cual se puede conocer al mostrar alguna imagen en la misma, evitando colocarla al revés.
- Los LEDs traseros, los cuales has de soldar con la precaución de que las soldaduras no hagan contacto con el robot.
- Si el diseño del DYOR cuenta con los brazos en la misma posición que este modelo, hay que tener en cuenta que estos colisionan al girar, por lo que hay que doblarlos un poco para evitarlo.
- Como consejo, es mejor el uso de cinta adhesiva de doble cara para la sujeción de los elementos, ya que esta evita en contacto de los pines con el chasis de metal, evitando cortocircuitos ademas de ser más estética que las bridas.
Funcionamiento
Este robot está programado con tres modos de funcionamiento, el cual se controlará con el teléfono móvil con una aplicación diseñada en el APP Inventor 2.
El Modo 1, o modo manual, nos permite controlar el DYOR con el uso del acelerómetro del móvil su movimiento, y con el uso de varios botones en la aplicación controlar diversas funciones.
El Modo 2, o modo automático, hace que el robot se mueva de forma autónoma, evitando colisionar contra los objetos de su entorno.
El Modo 3, o modo molesto, es un modo que como su nombre indica, molesta, ya que emite una serie de pitidos agudos que son bastante molestos, ademas de mover los servos del DYOR intentando así, generar la mayor cantidad de ruido posible.
Vídeos
Autor: Anómimo.[:]