[:es]En esta publicación se muestra el proceso de fabricación y el funcionamiento de una versión DYOR del famoso droide R2D2.
Materiales
Las piezas para construir el cuerpo de este R2D2 tienen un origen muy diverso.
Tronco:
- Bote metálico de cacao soluble de 12,3 cm de altura y 10 cm de diámetro.
- Piezas de cartón de aprox. 1 mm de grosor para forrar el interior del bote.
- 3 piezas madera 11,3 x 1 x 1 cm.
- Madera 4,5 x 4,5 x 2,3 cm.
- Rueda fija de goma de 3 cm de diámetro 1 cm de ancho.
- Contrapeso.
- Chapa soporte siguelineas (Diseño 2).
- Soporte de placa.
- Tornillo para el soporte.
- Arandela 4 mm de diámetro interior.
- 4 tornillos 4mm de diámetro interior.
Cabeza:
- Tapa de plástico azul del bote de cacao soluble.
- Semiesfera de plástico hueca.
- 3 cilindros de cartón de 1 cm de alto y 1 cm de diámetro.
- 4 grapas.
- Aplique (engranaje) para servo de plástico en forma de cruz.
- Cinta adhesiva de doble cara.
- Cinta adhesiva.
- Cuña madera.
- Chapa metálica soporte cabeza (Diseño 3).
- 2 maderitas de 0,4 x 2 x 0,7 cm.
- Tornillo 4 mm de largo y 1 mm de diámetro.
- 2 tornillos 8 mm de largo y 2 mm de diámetro.
Brazos:
- Vara de tornillo de 18 cm de largo y 4 mm de diámetro.
- 8 tuercas 4 mm de diámetro interior.
- 8 arandelas 4 mm de diámetro interior.
- Chapa metálica (cortada por fresadora de control numérico) con el diseño de los brazos en 2D (Diseño 1).
- 2 chapas soporte servos ruedas (Diseño 4).
- 4 tornillos 2 mm de diámetro.
- 4 tuercas 2 mm de diámetro interior.
- 6 tornillos 8 mm de largo y 2 mm de diámetro.
- 2 maderas (hombros) sujeción entre brazo y vara de tornillo.
Decoración:
- Pintura en spray blanca mate.
- Pintura en spray plateada.
- Pintura acrílica blanca .
- Pincel.
- Rotulador permanente azul de punta mediana.
- Rotulador permanente plateado de punta mediana.
- Rotulador gris de punta fina.
- Compás.
- Portaminas o lápiz.
- Goma de borrar.
- Cinta métrica.
Componentes electrónicos:
- Arduino Nano v3.0.
- I/O Extension Shield para Arduino Nano.
- Sensor Ultrasonidos HC-SR04.
- Zumbador KY-006.
- Módulo Siguelíneas TCRT5000.
- SPP-C Bluetooth.
- Matriz LEDs 8×8 max7219.
- Tira de 3 RGB LEDs.
- 2 micro servos FS90R.
- 2 ruedas FS90R.
- Micro servo SG90.
- Powerbank 3600mAh USB.
- Cable acodado mini-USB de 23 cm.
- 13 cables DuPont H-H 20 cm.
- 6 cables DuPont F-F 10 cm.
Montaje
El procedimiento general seguido para este montaje fue:
1. Diseño y corte de los brazos.
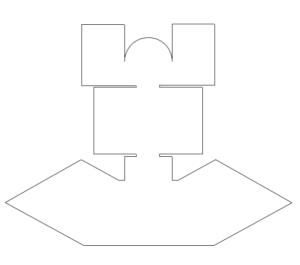

(Diseño 1)
2. Doblar las piezas de los brazos y soldar la parte interior de la curva superior.



3. Realizar los agujeros de los brazos [1].
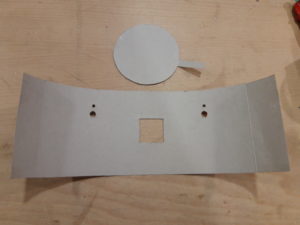
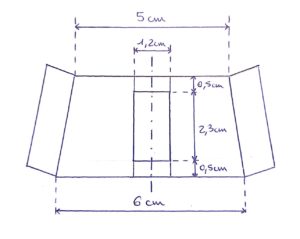
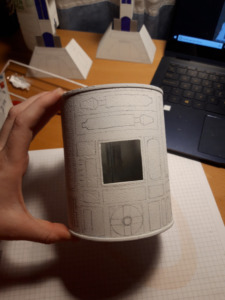
4. Realizar los agujeros laterales del cilindro central y cortar el hueco para la matriz de LEDs [2].


5. Realizar el forro interior para el cilindro central y hacer los agujeros correspondientes [3].
6. Cortar, limar y moldear las maderas de los hombros del robot para sujetar los brazos al tronco.




7. Realizar un agujero en cada madera para que pase la varilla tornillo y una canaleta para que pase el cable de los servos.
8. Realizar los agujeros de la semiesfera [4].

9. Cortar con la cizalla el soporte para el siguelíneas y realizar los agujeros necesarios.
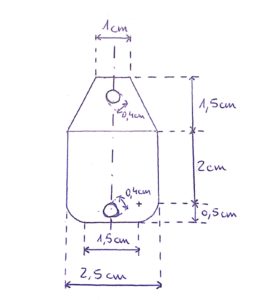 (Diseño 2)
(Diseño 2)
10. Cortar con la cizalla el soporte para la cabeza.
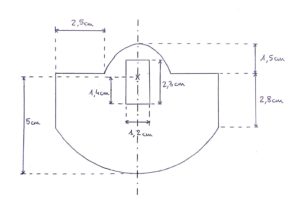 (Diseño 3)
(Diseño 3)
11. Realizar los agujeros necesarios en la tapa azul [5] y unir el aplique en forma de cruz a la tapa azul.



12. Cortar con la cizalla los soportes de los micro servos de las ruedas.
 (Diseño 4)
(Diseño 4)
13. Cortar los cilindros de cartón para la cabeza y pintarlos con rotulador permanente plateado.
14. Limar todas las piezas.
15. Pintar los brazos y el tronco con la pintura blanca en spray (mínimo 2 capas).


16. Pintar la semiesfera con la pintura plateada en spray.
17. Pintar la madera de 4,5 x 4,5 x 2,3 cm con la pintura acrílica blanca.
18. Poner celo por la parte inferior de la tapa (para evitar que se pinte) y pintar la parte superior con el rotulador permanente plateado.
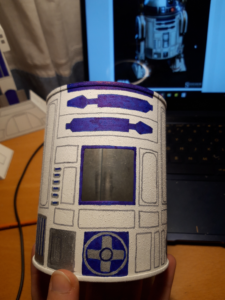
19. Dibujar con lápiz y con la ayuda del compás y la cinta métrica las figuras del robot.

20. Pintar la cabeza con el rotulador permanente azul.

21. Pintar los brazos y el tronco con los rotuladores permanentes azul y plateado y repasar los «relieves» con el rotulador gris de punta fina.

22. Poner los cables necesarios en cada componente electrónico.
23. Pegar con cinta adhesiva la tira de 3 LEDs RGB en el interior de la cabeza, haciendo coincidir los LEDs con los agujeros.
24. Pegar el sensor de ultrasonidos con cinta adhesiva y colocar la cuña de madera para fijar el sensor.
25. Atornillar el servo SG90 al soporte de la cabeza [6].
26. Atornillar el aplique en forma de cruz (sujeto a la tapa azul) al servo con el tornillo de 4 mm de largo y 1 mm de diámetro.
27. Pasar los cables del ultrasonidos y la tira de LEDs por el agujero de la tapa azul.
28. Pegar la tapa azul con cinta adhesiva de doble cara a la semiesfera.
29. Doblar un poco el soporte del siguelíneas y atornillarlo al sensor.
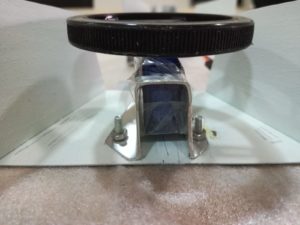
30. Atornillar el taco de madera de 4,5 x 4,5 x 2,3 cm a la base del tronco.

31. Atornillar el soporte con el sensor siguelíneas junto con la rueda fija al taco de madera.
31. Colocar el forro interior de cartón.
32. Colocar las 3 piezas madera de 11,3 x 1 x 1 cm con cinta adhesiva para que puedan aguantar el soporte de la cabeza.
33. Pasar los cables del siguelíneas por su agujero correspondiente.
34. Atornillar las ruedas a los servos FS90R y los servos a sus soportes con los tornillos de 8 mm de largo y 2 mm de diámetro.
35. Pasar los cables de los micro servos por los agujeros correspondientes.
36. Sujetar la varilla tornillo a los tacos de madera (hombros) y al cilindro central con las tuercas y las arandelas.


37. Atornillar los soportes de los servos a los brazos.
38. Pegar con cinta adhesiva de doble cara los brazos a los tacos de madera que hacen de hombros
39. Pegar con cinta de doble cara el contrapeso sobre el soporte del siguelíneas.
40. Pegar con pegamento instantáneo los cilindros de cartón en la cabeza.
41. Unir todos los cables a la placa de Arduino en su posición correspondiente.
42. Colocar la matriz de LEDs en su sitio.
43. Introducir la placa Arduino, el módulo bluetooth, el zumbador y la batería en el cilindro.


Especificaciones:
[1] Los agujeros de los brazos sirven para sujetar los soportes de los servos de las ruedas, por lo que irán en la parte inferior, a 1,5 cm de distancia respecto al centro y 1,5 cm de distancia midiendo desde abajo.
[2] El cilindro central de R2D2 es el bote metálico de cacao soluble. El bote metálico debe tener dos agujeros a cada lado: uno a 3,5 cm de distancia del borde superior de 4 mm de diámetro para que pase la vara tornillo que sirve para sujetar los brazos y otro por debajo de 1 cm para que pasen los cables de los servos de las ruedas. En la parte inferior debe tener otro agujero para pasar los cables del sensor siguelíneas y dos agujeros para atornillar el taco de madera de 4,5 x 4,5 x 2,3 cm. Además, en el centro de la parte delantera debe haber un «cuadrado» hueco de 3,2 x 3,2 cm para colocar la matriz de LEDs.
[3] El interior del cilindro central está forrado con cartón para evitar cortocircuitos en los componentes electrónicos. En el forro de cartón se deben realizar los mismos agujeros que tiene el cilindro exterior (el tronco) excepto los dos agujeros que están en la base para sujetar el taco de madera de 4,5 x 4,5 x 2,3 cm.
[4] La semiesfera debe tener 2 agujeros para que salga el sensor de ultrasonidos (diámetro 1,5 cm en posición horizontal) y los 3 agujeros para la tira de LEDs RGB.
[5] La tapa azul debe tener un agujero en el centro para colocar el aplique (en forma de cruz) del servo y otro agujero delante para pasar los cables y que no molesten cuando gire la cabeza.
[6] Colocar una maderita de 0,4 x 2 x 0,7 cm entre el tornillo (8 mm de largo y 2 mm de diámetro) y el servo.
Funcionamiento
Con la ayuda del software facilino he creado un código en C que permite que el robot siga las ordenes que mando a través de una aplicación para el móvil (sistema operativo Android) que he diseñado con el entrono Mit App Inventor 2.

Esta aplicación tiene un botón de para conectarse por bluetooth con el robot y otro para desconectarlo.
Tiene unos botones para dirigir al robot por control remoto haciendo que se mueva hacia delante, hacia detrás, que gire hacia los dos sentidos y se pare. Cada vez que realiza una de estas acciones, R2D2 indica con la matriz de LEDs la dirección que va a tomar y reproduce una combinación distinta de los sonidos de su idioma tan peculiar. Cuando está parado reproduce con la matriz de LEDs el objetivo que La Resistencia debe destruir: La estrella de la muerte.
Demostración en clase:
Además tiene otros 3 botones: con el primero, el sigue-líneas: el robot puede seguir una línea negra sobre un fondo blanco; con el segundo, el ultrasonidos: R2D2 es capaz de evitar obstáculos, girando la cabeza a ambos lados si es necesario para decidir por donde seguir. Y si pulsas el tercero, música: reproduce la marcha imperial.
[:]