En esta entrada veremos la primera experiencia de un estudiante al montar un robot de chapa metálica controlado por un un arduino uno con todo detalle.
Montaje
Antes del montaje todos los alumnos diseñamos nuestro robot personalizado al gusto de cada uno pero la empresa que se encargaba del recorte de las chapas nos dijo que los diseños no cumplía con las tolerancias, pero no dijo que diseños cumplían y cuales no las tolerancias de su cortadora, cosa extraña yo pienso que para ellos es mucho más sencillo, rápido y barato realizar un diseño 20 veces iguales que 20 diseños diferentes.
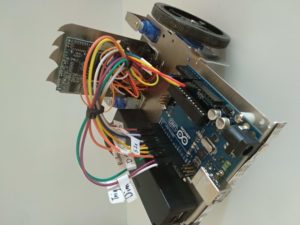
El proyecto estaba basado en un arduino nano pero yo tenia un arduino uno cogiendo polvo en una caja desde 1 de bachiller y quería darle un uso haciendo caso omiso de los consejos de Leopoldo Armesto, ya que yo ya sabia como solventar el fallo de que con mi arduino tenia muy pocas conexiones de 5V y de gnd cosa que pensé solucionar con una regleta uniendo todos los cables de 5v y gnd de los actuadores y de los sensores como muestro a continuación.

Pero no fue la única dificultad que encontré por usar otro arduino y era el cable de alimentación, esta no la pensé hasta que no lo había montado y es que el cable con el que programo arduino era muy grande y no era viable que el robot arrastrar cables, mi solución fue comprar un cable barato y cortarlo al tamaño que yo necesitaba para posteriormente soldarlo.

Otros problemas que tuve en el montaje fueron que el sensor del siguelineas tocaba el suelo y tuve que subirlo añadiéndole trozos de cartón como se puede ver esta imagen.

A causa del material utilizado, chapa metálica, surgieron problemas, ya que habían piezas que no encajaban bien, por ejemplo mi robot va torcido ya que un motor no apoya bien y se queda levemente ladeado o la pantalla que iba un poco justa pero ese tenía fácil solución, un poco de silicona caliente.

Ya que tengo poca experiencia soldando me surgió un problema con la conexión de las luces traseras ya que había que soldarlas y no se paraban de soltar continuamente y aunque las volviera a soldar se volvían a caer, finalmente desistí de usar luces traseras.

Solventando todos los problemas mi recomendación cara al montaje es ir con calma y en este caso tener cuidado ya que la chapa metálica es conductora y podéis hacer un cortocircuito, ademas recomiendo etiquetar los cables con su nombre o para que sirven y la entrada del arduino al que va conectado por si se da el caso que se desconecta algo poder arreglarlo fácilmente ademas ayuda bastante a la hora del montaje.

A continuación os dejo un par de imagen del robot ya montado.
Software
La idea principal era un robot controlado por bluetooth desde una aplicación del móvil diseñada por mi, ademas de contar con un modo siguelineas y un modo anticolisión. Pero por problemas que desconozco y después de haber diseñado tuve que quitarme la idea de la cabeza que se pudiera hacer todo desde el móvil ya que no se porque motivo cuando se conecta el bluetooth desde la aplicación se envían o el receptor recibe una lectura con un montón de variables que desconozco haciendo que el robot se vuelva loco y en programas «sencillos» que las ordenes solo hacen que se mueva no pasa nada ya que hace cosas pero luego para pero en el programa que estaba escribiendo que activa el siguelineas por ejemplo con una variable y sale con otra, solo por conectarme iniciaba el programa de siguelineas y ya no salia. Viendo estos problemas acabe teniendo tres programas diferentes, un control manual por bluetooth, un siguelineas y un evita obstáculos que a continuación y junto a imágenes de la aplicación explicaré detenidamente.
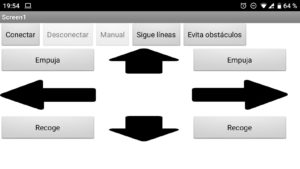
Esto es lo que aparece en la pantalla principal con el modo manual por defecto y a la espera de que pulsemos en conectar para conectarnos a nuestro robot, arriba junto a los botones de conectar y desconectar están los de cambio de modo que siempre están visibles y dependiendo del modo están pulsados o no, abajo tenemos la interfaz del modo manual que cambiará dependiendo del modo en el que estemos, esto lo hemos conseguido jugando con la variable de visibilidad de las tablas que aparecen y/o desaparecen a nuestro gusto.
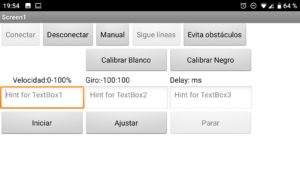
A continuación podemos ver el modo de siguelineas en el cual podemos configurar los parámetros mas importantes de este modo para conseguir que funcione de una forma óptima.
En la primera fila podremos ver el valor de la señal del sensor infrarojo para poner calibrar los valores exactos del color negro de la linea y el blanco del circuito en el que estemos, en la fila de abajo podremos modificar la velocidad a la que queremos que vaya nuestro robot, lo cerrado que hace el giro y el tiempo que esta girando para orientarse en la linea. Finalmente veremos los botones de iniciar el modo, ajustar, que es para volcar los parámetros de velocidad, giro y delay, estos si hemos iniciado el siguelineas no se podrán modificar, al arduino y el de parar que detiene el siguelineas.
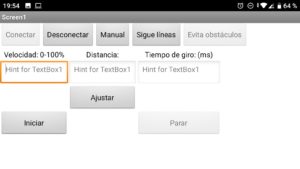
Por último esta es la pantalla del evita obstáculos en la cual podremos iniciar y parar el programa y poder ajustar los valores a nuestro gusto.
Los valores a ajustar, gracias a un botón de ajustar cuando el modo esta en parado, son: la velocidad a la que se desplaza nuestro robot, la distancia a la que queremos que nuestro robot detecte el objeto y el tiempo que queremos que este girando, es decir cuando más tiempo pongamos el angulo de giro será mayor. Justo en la fila de debajo del botón de ajustar tenemos los botones que inician o paran este modo de evita obstáculos.
Para finalizar os dejo más imágenes de robot que finalmente he montado, disculpa si esta giradas ya que el programa no me deja de ninguna manera.