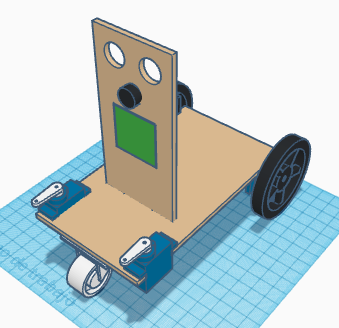
[:es]En esta entrada os mostramos el ensamblaje del robot DYOR Standard realizado con TinkerCAD y fabricado con corte láser.
Componentes:
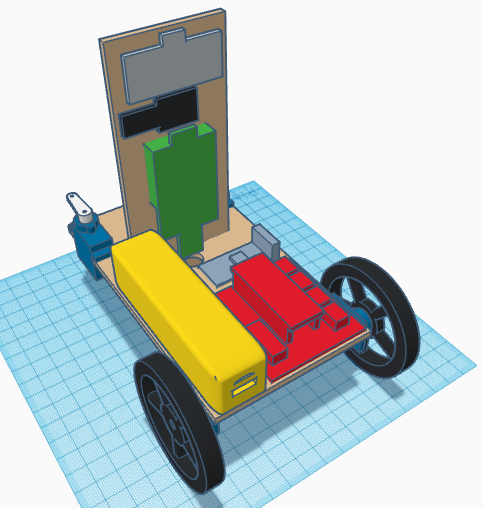
- Arduino Nano + Shield Arduino Nano I/O (rojo)
- Powerbank (amarillo)
- Ultrasonido HC-SR04 (gris claro)
- Zumbador de sonido (negro)
- Servos SG90 (azul) en la base
- Servos FS90R (azul) en la base
- Bluetooth (gris)
- Seguilíneas TCRT5000 (azul oscuro)
- Rueda loca (blanco)
- Ruedas FS90R (negro)
- Matriz de LEDs (verde)
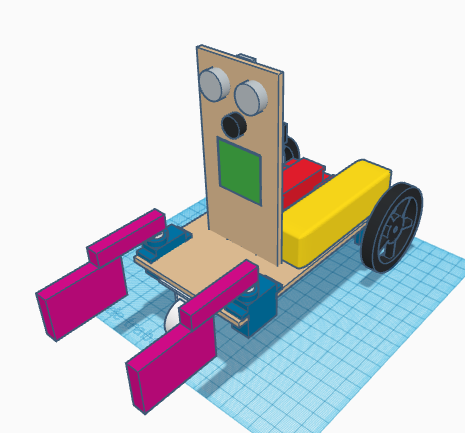
- Piezas de LEGO (morado)
Instrucciones:
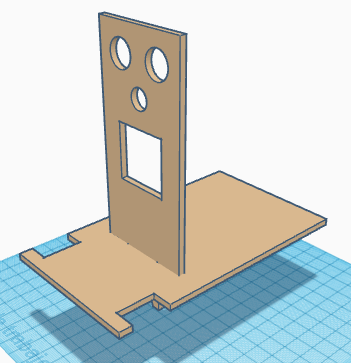
Colocar la pieza del frontal junto con la base y pegarlas.
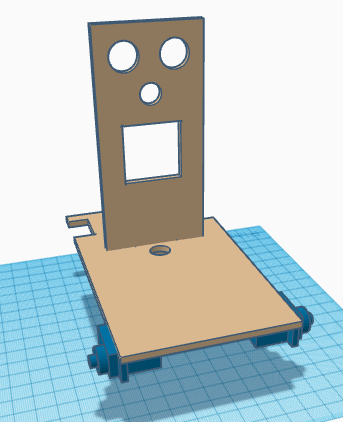
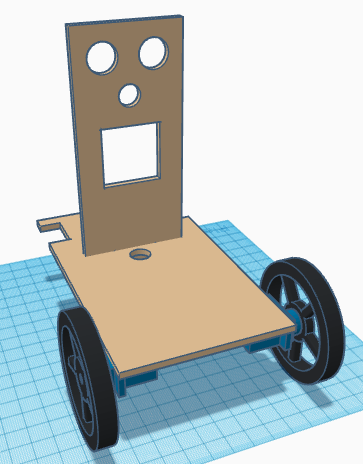
Pegar los servos FS90R a la base, estando el eje lo más atrás posible y atornillar las ruedas.
Pegar el sensor TCRT5000 en la parte inferior del frontal, procurando que sobresalga lo menos posible para que no colisione con la rueda luega que posteriormente pegaremos.

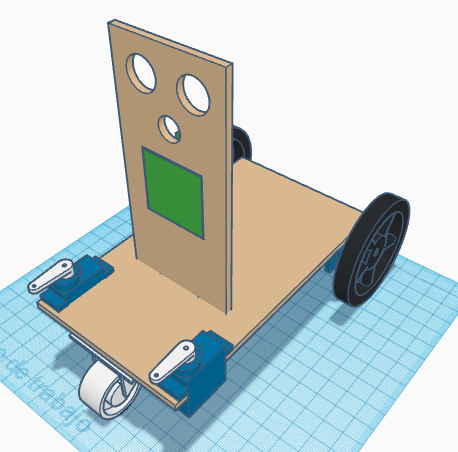
Pegar los servos SG90 estando el eje lo más adelantado posible. Atornillar la manilla del servo de forma que esté, tal y como se muestra en la figura, en su posición intermedia de 90º.

Pegar la rueda loca en la parte delantera de la base. Asegurarse que la rueda tiene el giro libre y que está centrada.

Pasar los cables de los servos FS90R y SG90, así como los cables del sensor TCRT5000 por el orificio de la base. Pegar la matriz de LEDs con los conectores de entrada en la parte inferior.
Pegar el zumbador.
Pegar el ultrasonido HC-SR04 con el conector apuntando hacia arriba.

Pegar el powerbank, la placa de expansión Arduino Nano I/O y el módulo bluetooth en la base del robot.
Pegar las piezas LEGO que sirven de pinza a las manillas de los servos SG90.
 [:en]In this entry, we show the assembly of DYOR Standard with TinkerCAD and make with laser cutting.
[:en]In this entry, we show the assembly of DYOR Standard with TinkerCAD and make with laser cutting.
Components:
- Arduino Nano + Shield Arduino Nano I/O (red)
- Powerbank (yellow)
- Ultrasound HC-SR04 (light grey)
- Buzzer (black)
- Servos SG90 ( blue) in the base
- Servos FS90R (blue) in the base
- Bluetooth (grey)
- Linetracker TCRT5000 (dark blue)
- Caster wheel (white)
- FS90R wheels (black)
- LED Matrix (green)
- LEGO parts (magenta)
Instructions:
Glue both parts, the base and the frontal face.
Glue the FS90R servos to the base, the servo axis has to be as far as possible to the frontal face and screw the wheels to the servos.
Glue the TCRT5000 sensor at the bottom part of the front trying to place it as far as possible to the front, to avoid collision with the cast wheel (later on).
Glue the SG90 servos with the axis as close as possible to the front. Screw the servo horns so that the mid position of 90º is as shown.
Glue the caster wheel below the base at the front part. Make sure that it freely turns and it is centred.
Pass the cables of servos and TCRT5000 through the hole at the base. Glue the LEDs matrix with the input connector pointing downwards.
Glue the buzzer.
Glue the ultrasound sensor HC-SR04 with the connector pointing upwards.
Glue the Arduino electronics, Powerbank and Bluetooth module to the robot base.
Finally, glue the LEGO parts corresponding to the grip to the servo SG90 horns.
[:]