Aprende a diseñar un modelo simplificado del sensor de luz TCRT5000 para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar el sensor de luz TCRT5000 para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el hueco necesario para ubicar el sensor en el frontal del robot.
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
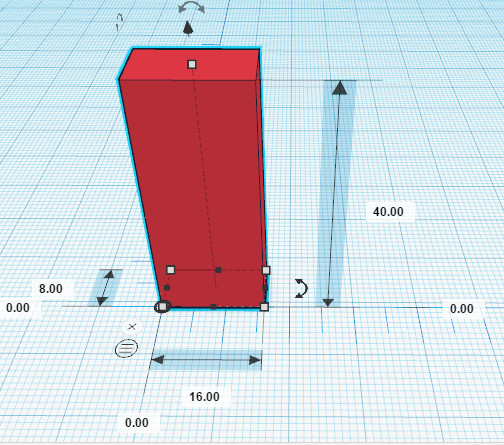
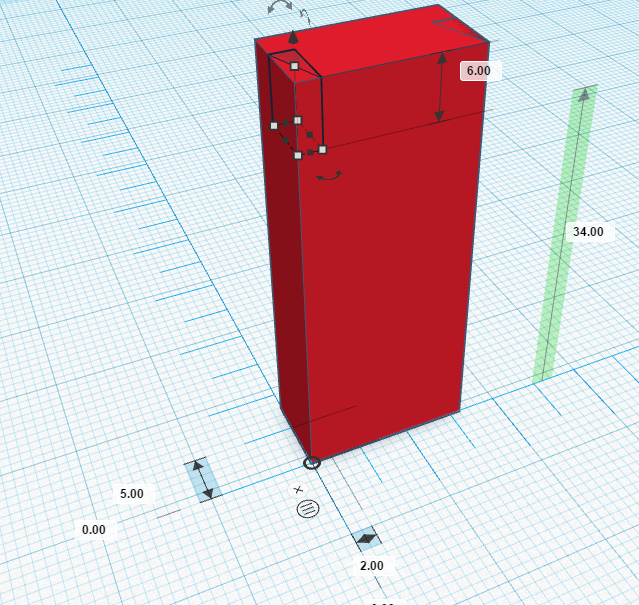
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (16,8,40), largo, ancho y alto, respectivamente.
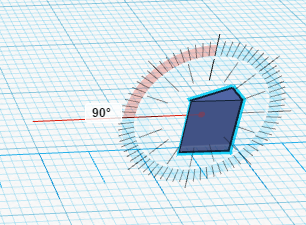
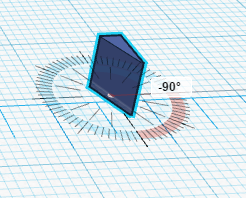
Después crearemos con forma de cuña un objeto que nos permitirá posteriormente eliminar parte del volumen del cubo anteriormente creado. Primero creamos el objeto cuña de dimensiones (6,2,5) y lo posicionamos en cualquier lugar y lo giramos 90º en la cara frontal (seleccionar el eje de giro según se indica en la figura) y después -90º con respecto a la cara superior.

Finalmente lo posicionamos en la coordenada (14,0,34) y establecemos que la forma del objeto es hueca.

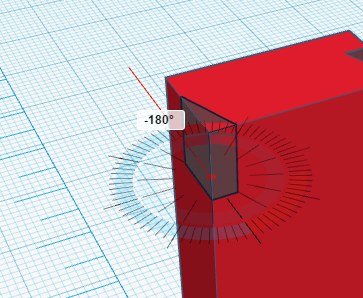
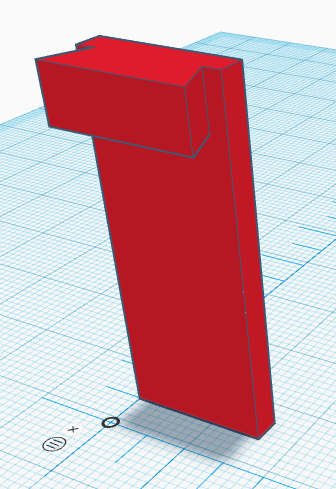
Ahora creamos la cuña para el otro hueco. Copiamos y pegamos la cuña ya existente y la posicionamos en la coordenada (0,0,34). Después aplicamos un giro en la cara superior de 180º y después 180º con respecto a la cara lateral.

Ahora creamos un cubo hueco de dimensiones (16,5,34) y lo posicionamos en la coordenada (0,0,0).

Podéis agrupar los objetos para que se generen los huecos correspondientes. Seleccionad todos los objetos y teclear CTRL+G.
Aquí podéis descargar el fichero STL con la solución (sólo para profesores y suscriptores):

