This blog post is about an Arduino-controlled robot. In this post, the design, the components and the features of the robot will be presented. The robot was created with the Facilino web editor and the MIT AppInventor2.
LovoRobo
Components:
The robot was assembled from the following components:
- Metal body sheet
- Arduino Nano v3.0 + Shield Arduino Nano I/O
- Cable Mini-USB
- Powerbank
- Ultrasound HC-SR04
- Infrared MH-sensor
- Servos FS90R (2x)
- Bluetooth
- Castor wheel
- wheels FS90R (2x)
- OLED
- Jumper cables
Design:
The design is based on the standard design.
The ultrasound sensor represents the eyes of the robot and the OLED represents the mouth (to see in picture 1). The infrared sensor is mounted int the front, under the robot.

The Powerbank, the Arduino and the Arduino Shield are mounted together with the Bluetooth module on the top of the robot. In operation, the Arduino is connected with the Powerbank via a Mini-USB cable (to see in picture 2).

On the bottom of the robot are the two drive wheels, which are driven by two servomotors. The third wheel is at the end of the robot and is a castor wheel (to see in picture 3).


Features:
Every feature can be controlled by an self developed mobile phone app via Bluetooth. The app was created with the MIT AppInventor2.The available features for the LovoRobo are:
- Steering the robot with Touch-down buttons
- Steering the robots with the acceleration sensors of the mobile phone
- Line tracking
- Obstacle avoidance
- Dancing “Lollipop”
- Dancing “Twerking”
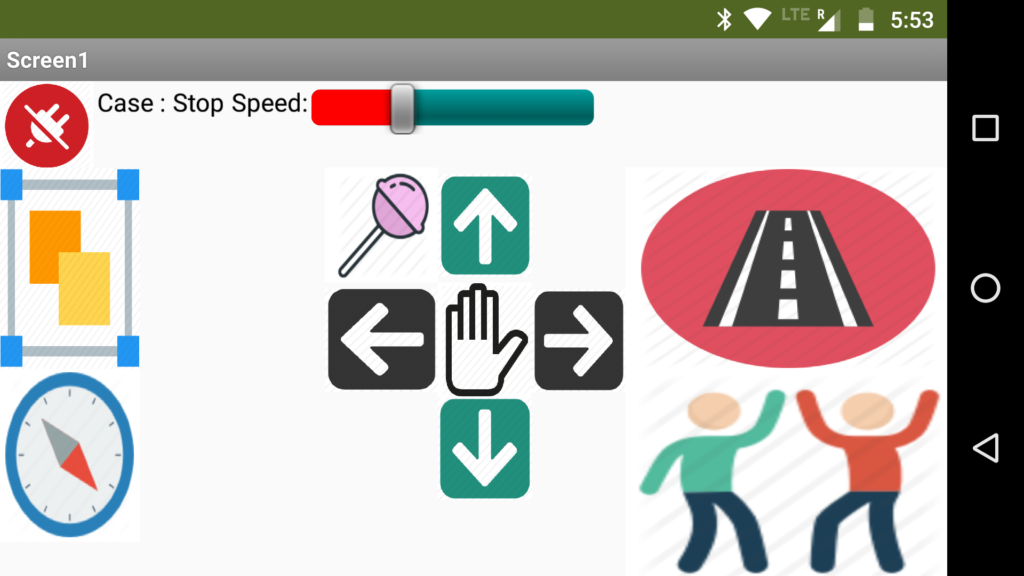
Each button on the app represents one command. As you see in picture 5, the commands are Bluetooth-connection (on/off), obstacle-avoidance-mode, acceleration-control-mode, speed-regulation, line-tracking-mode, two dance modes and the steering buttons.
The MIT AppInventor2 is block-programming based. To describe its functioning, figure 6 shows the implementation of the slide bar for speed regulating.

Line tracking

Following short video show the robot following a black line on a white background.
Obstacle avoidance
Following short video shows the robot driving forward. If a obstacle is on his way, he stops 15cm in front of it, turns randomly left or right and continuing driving straight forward.
Dance “Twerking”
Following short video shows the robot twerking.
Dance “Lollipop”
Following short video shows the robot dacing to the song “Lollipop”.