[:es]En esta entrada se muestra el proceso de construcción de F1 DYOR CAR, incluyendo el diseño, componentes y una breve explicación de las aplicaciones implementadas.

El proyecto consiste en la construcción de un coche de control remoto utilizando el microcontrolador ESP32. Las aplicaciones implementadas consisten en un sistema de evita obstáculos, así como un mando de control remoto con un sensor IR. Finalmente, se ha desarrollado una aplicación para su control desde un dispositivo móvil.
Diseño
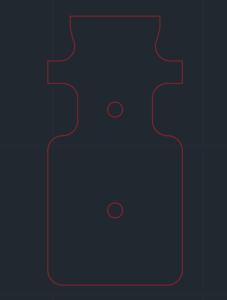
El diseño de la base del coche se diseñó en AutoCAD, introduciendo las medidas deseadas para su posterior corte en una madera de 3 mm de grosor.
Componentes
- Placa ESP32
- Sensor de ultrasonidos HC-SR04
- Servomotor
- 2 Motores reductores con ruedas
- 2 Ruedas delanteras (steering)
- Driver de motores dc L298N
- Sensor IR
- 2 Powerbanks (7.2 V)(5 V)
- 2 Switches
Aplicaciones
Disponemos de un switch que dependiendo de la posición en la que se encuentre, selecciona un modo u otro. Gracias a este switch podemos escoger entre la aplicación Bluetooth y las funcionalidades del sensor IR.
Evita obstáculos
Si se pulsa el botón 1 del mando de infrarrojos el robot pasa al estado de evita-obstáculos ya que el programa Arduino llama a la función diseñada para evitar obstáculos. La distancia de detección es variable.
Mando IR
Gracias al sensor IR, con un mando que envía señales infrarrojas, se ha programado para recibir dichas señales, asociando una función a cada botón, realizando un mando funcional.
Bluetooth Mode
Con la implementación del control por Bluetooth, se ha implementado un control por mando (botones), así como un control por acelerómetro.
Mando Bluetooth
Acelerómetro Bluetooth
Interfaz del usuario (App)
He creado con MIT App Inventor, la interfaz del usuario. Está compuesta por dos pantallas, cada una con su propio diagrama de bloques. Las imágenes para los botones han sido obtenidas de la página web Flaticon.
- Interfaz Mando Bluetooth

- Interfaz Acelerómetro Bluetooth

Código y material adicional
Autor
Diego Perelló Sánchez
[:]