[:es]En esta entrada se mostrará el diseño del robot DYOR Coppelia, bailarina de ballet.
DYOR COPPELIA
Diseño
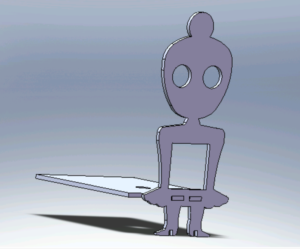
El diseño del robot ha sido creado usando SolidWorks. Para la creación de los planos 2D se utilizó AutoCAD.
En la siguiente imagen se puede comprobar que el ensamblaje es correcto, es decir que las piezas encajarán al montarse el robot.
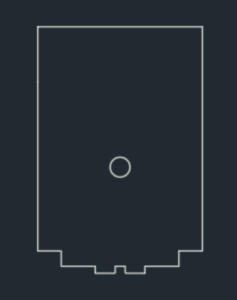
Luego se exportó el diseño AutoCAD para obtener los planos en 2D.

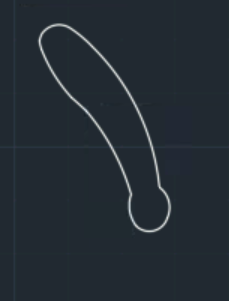
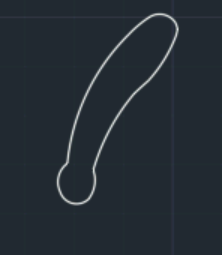
Y también se diseñaron los brazos:
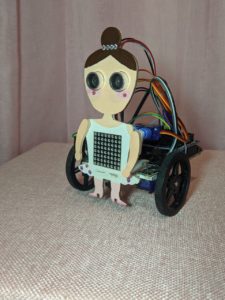
Finalmente, tras montarlo el robot quedó así:
Componentes electrónicos
- I/O Extension Shield para Arduino.
- ESP32 D1 R32 WiFi y Bluetooth.
- Batería portátil 9 V.
- Sensor ultrasonido HC-SR04.
- Zumbador de sonido KY-006.
- Servos SG90.
- Servos FS90R (x2).
- Módulo seguilíneas TCRT5000.
- Ruedas FS90R (x2).
- Rueda loca.
- Matriz de LEDs 8×8 max7219.
- Sensor de luz LDR KY-018 (x2).
Funcionalidades
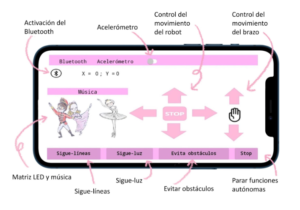
El robot se controla mediante una aplicación para móvil. La aplicación ha sido desarrollado utilizando App Inventor.
A continuación se explicarán cada una de las funciones.
Control remoto
El movimiento del robot se puede controlar con las flechas que aparecen el la app; hacia delante, hacia detrás, derecha e izquierda. El brazo también se puede mover arriba y abajo.
Música y matriz LED
Hay dos opciones. La primera canción es del ballet El Cascanueces, mientras se escucha la melodía en la matriz se muestra el borde del dibujo de un corazón y el corazón completo.
La segunda canción es del ballet El lago de los cisnes, en este caso en la matriz LED se irán alternando dibujos de notas musicales.
Modo acelerómetro
Cuando se activa este modo, el movimiento del control se controla moviendo el móvil.
Modo sigue-líneas
El robot realizará el circuito marcado por una línea negra.
Modo sigue-luz
El robot se moverá siguiendo la luz de una linterna.
Modo evita obstáculos
El robot se moverá hacia delante hasta que se encuentre con un objeto. En ese momento girará de manera aleatoria hacia la derecha o hacia la izquierda para evitara el objeto y luego continuará yendo hacia delante.
Vídeos
En los siguientes vídeos se mostrará el funcionamiento del robot:
[:]