En esta entrada se muestra el diseño y las directrices a seguir para poder fabricar un vehículo robot dirigido a control remoto con la apariencia de Homer Simpson. Se abordará tanto el diseño del robot como el de la App para controlarlo. El robot estará compuesto de la electrónica necesaria para poder realizar un modo detección de obstáculos, un modo siguelíneas y un modo fiesta que complementarán al modo de control remoto básico (de forma manual o mediante el uso del acelerómetro).
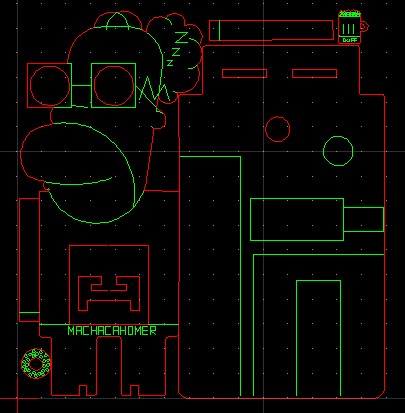
Diseño 2D
Diseño 3D
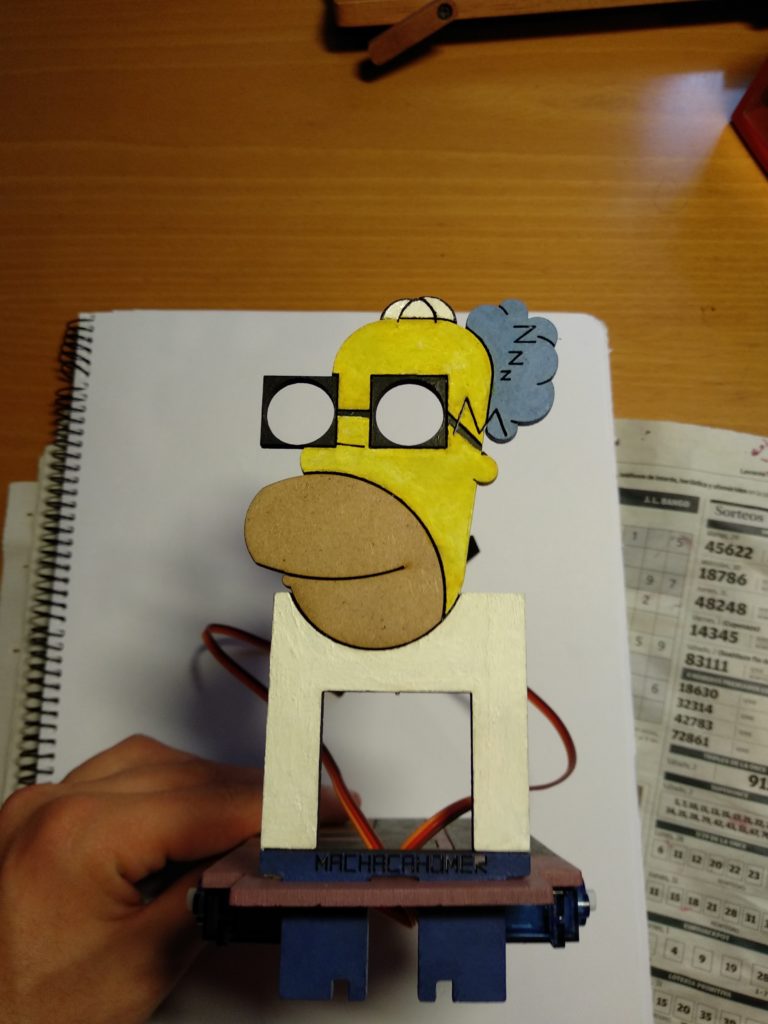
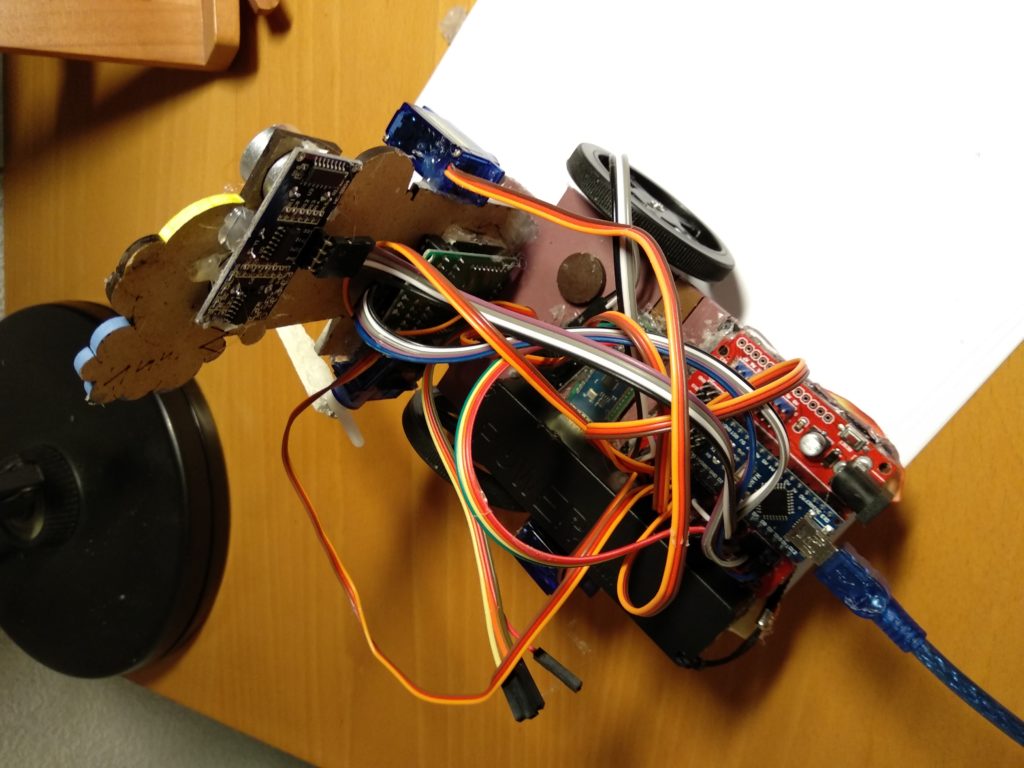
A partir del diseño 2D mostrado se realiza la impresión 3D o el corte láser de las piezas diseñadas. El resultado obtenido debería ser parecido al que se muestra a continuación:
Ensamblaje
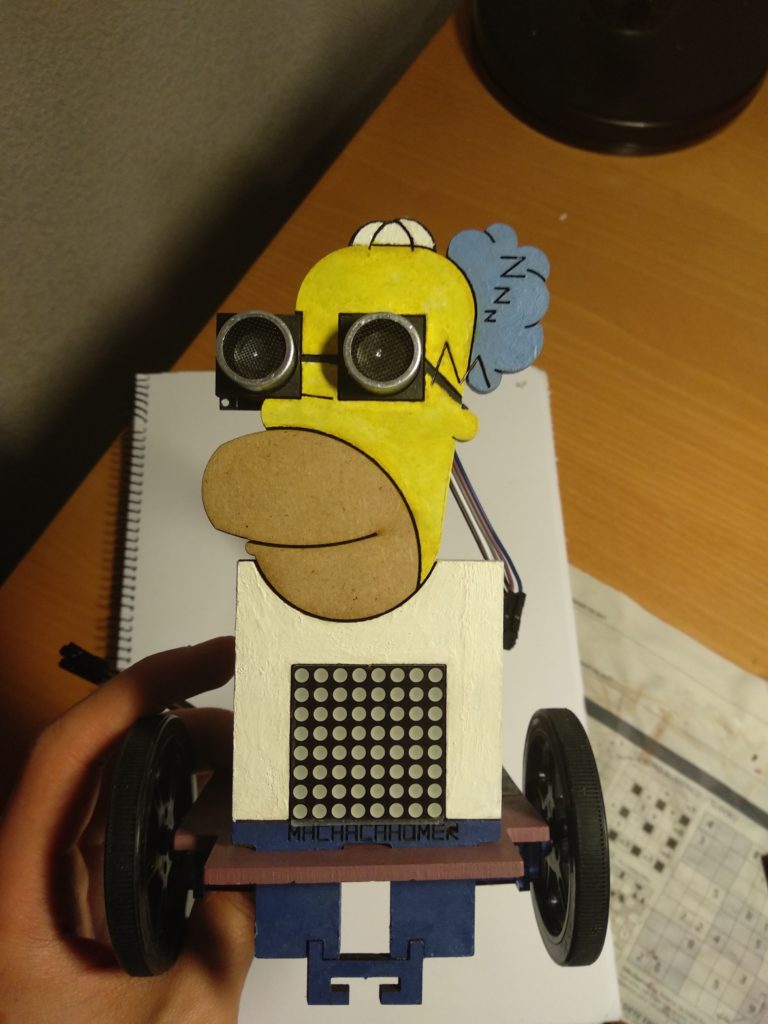
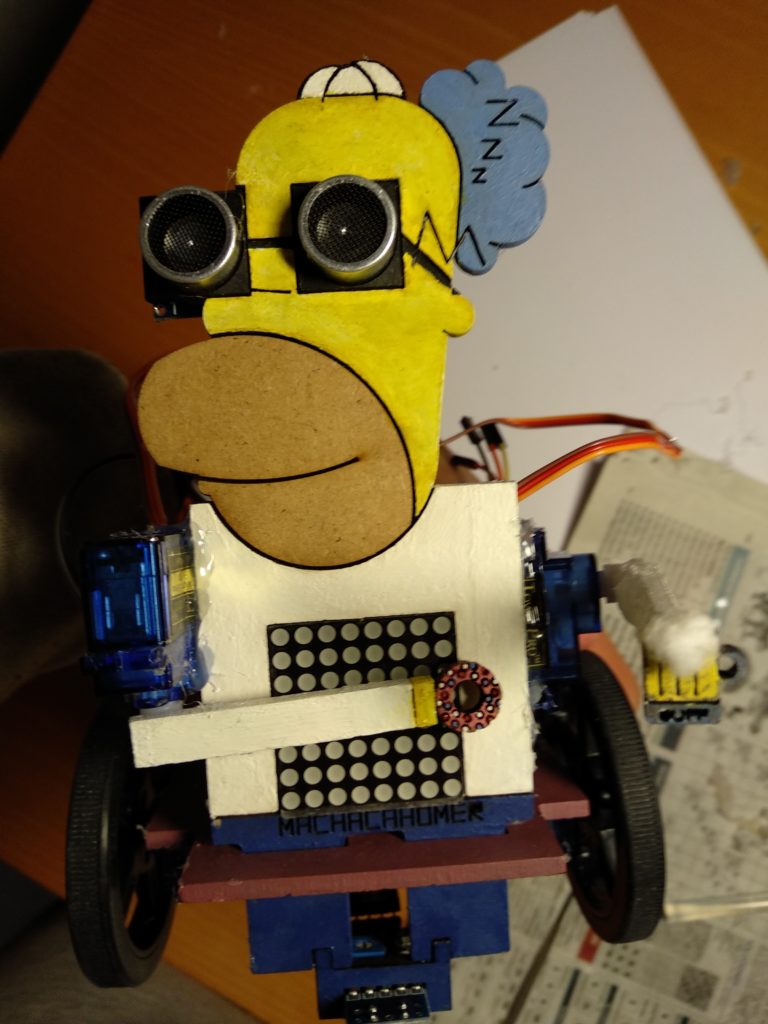
Este es el robot final pintado y ensamblado con todos los componentes electrónicos y accesorios. Con esta visualización en 3D se pretende dar una visión global de como ha de quedar el robot e indicar de forma más clara y visual la ubicación de cada uno de los elementos que lo forman.
Componentes:
- 1 x Arduino Nano + Shield Arduino Nano I/O (rojo)
- 1 x Powerbank (negro)
- 1 x Ultrasonido HC-SR04 (gris claro)
- 1 x Zumbador de sonido (negro)
- 3 x Servos SG90 (azul)
- 2 x Servos FS90R (azul)
- 1 x Bluetooth (verde oscuro)
- 1 x Seguilíneas TCRT5000 (azul)
- 1 x Rueda loca (blanco)
- 2 x Ruedas FS90R (negro)
- 1 x Matriz de LEDs (verde)
- Piezas de LEGO (marron)
- Llamas de decoración (rojo)
Fabricación y montaje
En primer lugar se pintan las piezas y se pega la cara del robot a la base.
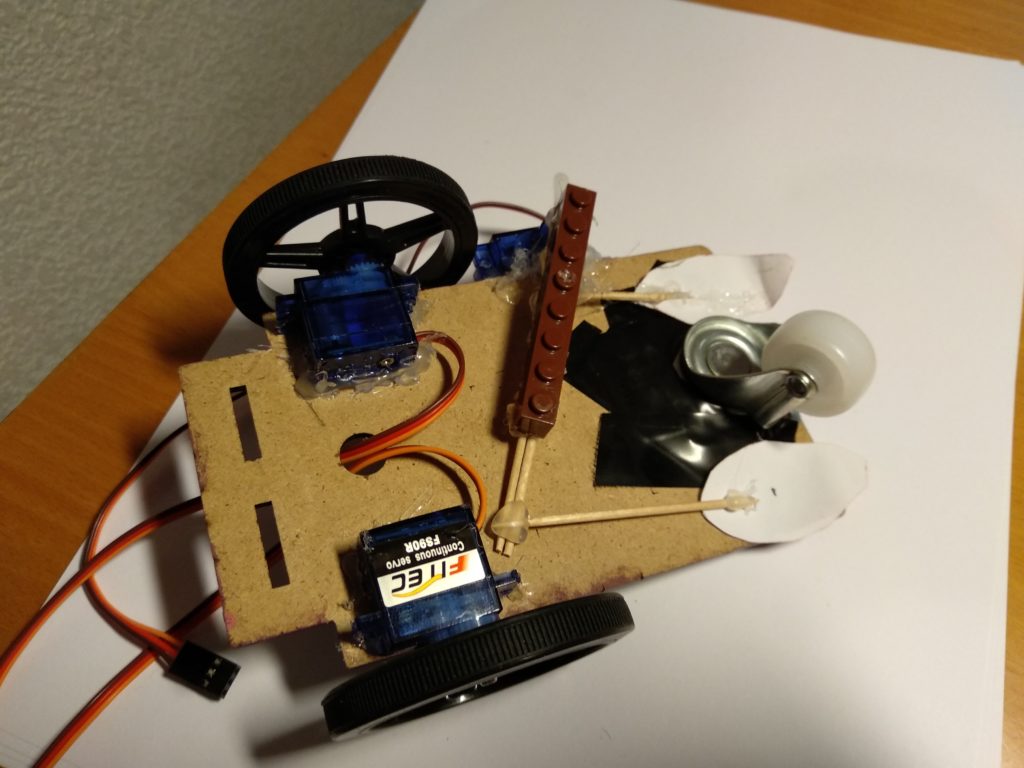
A continuación se pegan los servos de rotación continua (FS90R) y se le añaden las ruedas.

Después se le pega el soporte para el sensor siguelíneas (en los pies) y la matriz de leds.
Más tarde se le construye el mecanismo de las llamas que funciona con un motor SG90. Se ha de tener en cuenta de que cuanto mayor sea el peso del mecanismo peor, por lo tanto cuanto más simple sea el diseño de este mecanismo mejor (aunque no sea muy estético).
Después se pega el sensor de ultrasonidos, el sensor seguilíneas y los dos motores SG90 sobre los que se pegarán los brazos.
Por último se pega el buzzer, la powerbank, el arduino y el dispositivo bluetooth.
Electrónica
Conexionado
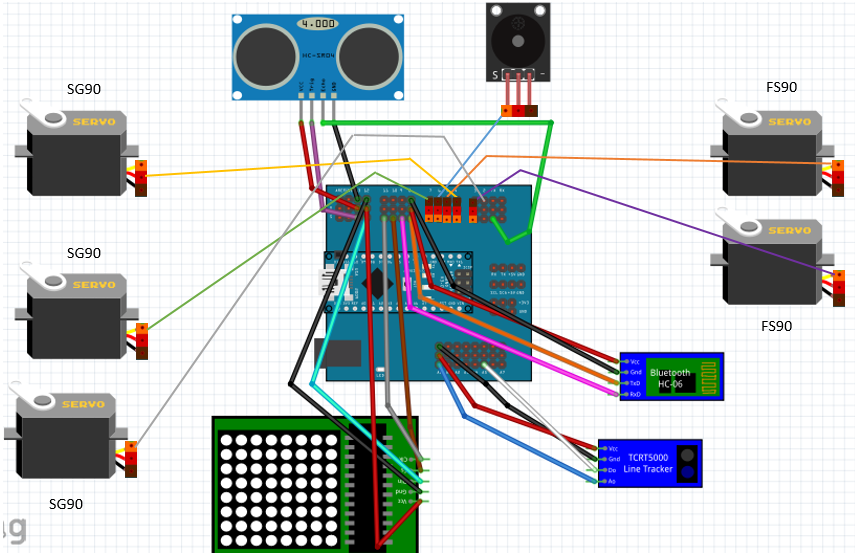
Conexión de pines
- Bluetooth: TX (D8), RX (D9).
- Servos de rotación continua: Izquierdo (D5), derecho (D3).
- Servos SG90: Izquierda (D4), Derecha (D7), Llamas (D2).
- Matriz de LEDS: CS (D10), CLK (D11), DIN (D12).
- Ultrasonidos: ECHO (D1), TRIGGER (D13).
- Zumbador: D6.
- Seguilíneas: A0.
Programación y Facilino
La estructura básica para realizar el código correspondería al siguiente diagrama de bloques del FACILINO. De esta forma, además de configurar los pines y definir el nombre del bluetooth para que te sea más fácil conectarlo, se definen las acciones que tiene que realizar el robot cuando recibe cada comando desde la app. De esta forma, si se recibiera un 1 el robot haría la función adelante, si se recibiera un 2 haría la función derecha y así sucesivamente.

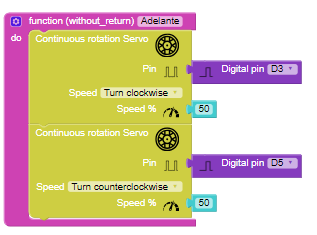
Así pues, únicamente restaría realizar la tarea de programación que se puede hacer empleando lenguaje de código directamente sobre la estructura que se ha generado previamente en el Arduino o con la ayuda de los bloques del FACILINO. Un ejemplo de función definida en FACILINO sería la siguiente:
App
Fotos
Cuando se incia la app nos aparece la siguiente imagen durante unos segundos mientras suena la intro de los simpsons.

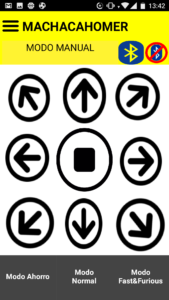
Pasados esos 3-4 segundos se abre la ventana mediante la cual podemos acceder al modo normal de funcionamiento, es decir, controlar el robot mediante las flechas. Los botones de conexión y desconexión del bluetooth te permiten emparejar y desemparejar el telefono con el robot. Además se te presenta la opción de elegir entre 3 modos de funcionamiento. El modo ahorro en el cual la intensidad de la matriz de leds es baja y la velocidad baja también; el modo normal en el cual la matriz de leds brilla al máximo y la velocidad es un poco mayor a la anterior; y por último el modo fast & furious en el que se acciona el motor de las llamas para que estas se vean con mayor claridad, la matriz de leds brilla al máximo y la velocidad es más alta. Al pulsar cada botón se reproduce un sonido característico de Homer relacionado con cada función.
Mediante el menú lateral desplegable se puede seleccionar otros modos de funcionamiento. En cada modo, al abrirse la ventana, sonará una frase de una escena conocida de los Simpsons. Además, hasta que no se empareje con algún dispositivo no te permitirá iniciar el modo.
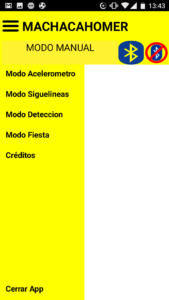
Este es el modo acelerómetro. En este modo puedes controlar el robot inclinando el teléfono en vez de usar los botones.

Este es el modo seguilíneas en el cual el robot tiene que seguir el circuito que hemos realizado con cinta adhesiva negra.

Este es el modo detección en el cual el robot avanzará feliz hasta que se tope con un obstáculo, en ese momento se parará, moverá el brazo para intentar apartarlo, se pondrá triste y sonará la canción de la cucaracha porque ya no puede caminar. Una vez acabado esto girará unos 90 grados aprox y reanudará la marcha si no detecta ningún obstáculo.

En el modo fiesta puedes mover la bola de fiesta como si de un spinner se tratara. Cuanta mayor velocidad de giro le imprimes a la pantalla mayor es la velocidad de rotación de la bola. Mientras tanto suena una canción de música disco. A su vez, el robot comenzará saludando (levantando la jarra de cerveza), diciendo su nombre por la matriz de leds y haciendo un par de pasos de baile. Esta operación se repite un par de veces hasta que suena la canción de despacito.

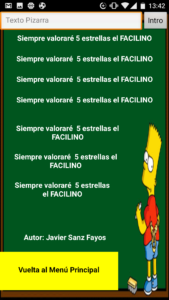
Por último, el modo créditos representa la famosa escena del final de los Simpsons en la que Bart está castigado en la pizarra escribiendo frases. La primera frase (que es la que se puede observar) viene por defecto y una vez acabe te dará la opción de escribir texto. Ese texto que introduces es el que escribirá Bart a continuación. Este modo no tiene interacción con el robot.
Vídeos Demostrativos/Explicativos
El robot cuando se conecta realiza lo siguiente:
Ejemplo de modo normal con cursores y tipos de funcionamiento:
Ejemplo de modo acelerómetro:
Ejemplo de modo siguelíneas:
Ejemplo de modo detección de obstáculos:
Ejemplo de modo fiesta:
Datos del alumno
Nombre: Javier Sanz Fayos
Escuela Técnica de Ingeniería del Diseño
Univeristat Politècnica de València
Grado de Ingeniería Electrónica
Grupo: 243