[:es]En esta entrada se muestra el diseño y funcionamiento de un robot DYOR.
Nuevo Robot DYOR
Descripción
A continuación se os muestra el robot DYOR «luchador mexicano», el cual consiste en un evita obstáculos, que cuando detecta un objeto a una distancia de 40cm o menor, realiza un giro a su derecha con tal de esquivarlo. Mientras no detecte ningún obstáculo la matriz de LEDs dibujará un tick de verificación, mientras que cuando detecte alguno dibujará una equis.
Diseño
Imágenes del robot montado:



Componentes electrónicos
- Ultrasonidos HC-SR04
-
Matriz de LEDs 8×8
-
Servomotor rotación completa FS90R (x2)
- Placa arduino nano
- Batería Power Bank 5V
- Rueda giratoria(x2)
- Rueda loca
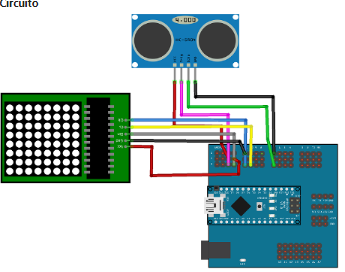
Imágenes
A continuación se muestran imágenes del diagrama de bloques de Facilino así como de las conexiones de los componentes en la placa de Arduino nano.
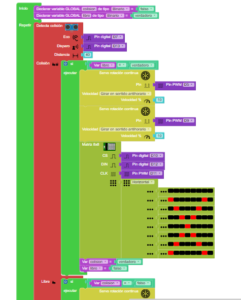

Esta parte corresponde a la detección del obstáculo Esta parte corresponde a la circulación libre.
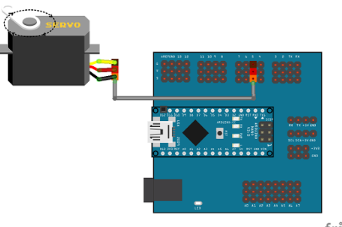
El montaje correspondiente al otro servomotor se realiza de la misma manera pero en el pin 9.
Vídeo del fucionamiento
El siguiente video muestra el funcionamiento del robot:
Autor:
Jorge Peris Martínez
Universitat Politècnica de València
Grado de Ingeniería Electrónica[:]