[:es]En esta entrada se desarrolla el diseño de un robot boxeador imprimible en 3D.
Introducción
El objetivo de este proyecto es desarrollar un robot capaz de realizar los movimientos de un boxeador humano. El comportamiento del mismo vendrá determinado por el programa que se le instale existiendo tres de ellos: combate, modo cobarde y control mediante app. En el modo combate el robot avanzará hasta encontrar un obstáculo el cual golpeara hasta derribarlo o pasado un tiempo admitir su derrota y realizar gestos de depresión. Por otra parte, el modo cobarde el robot retrocederá al detectar un obstáculo y realizará golpes discretos hasta detectar que ya no existe ningún obstáculo o admitir su derrota y realizar gestos de depresión. Finalmente, mediante una app se podrá controlar todos los movimientos del robot.

Componentes
Componentes electrónicos
- AZDelivery XL4016E1 DC-DC Step Down Buck
- CABLEPELADO Cable Adaptador de bateria Arduino DC 9V Negro
- ELEGOO Sensor Ultrasonidos HC-SR04
- DSD TECH HC-05
- MG996R Metal Gear Torque servo Motor x8
- Servo motor SG90
- Pilas de litio recargables 9V
- ARCELI 16 Canales PWM/Servo Driver IIC interface-PCA9685
- ELEGOO UNO R3 Tarjeta Placa ATmega328P ATMEGA16U2
- Cables macho-macho y macho-hembra
Otro componentes
- Tornillería M3
- Silicona
- Estaño
- Kit PCB
Herramientas
- Pistola de silicona
- Soldador
- Destornillador
Diseño
Piezas
El diseño del robot se basa en los robots «Zowi» dado que la forma de movimiento será la misma . Sin embargo, el tronco superior será diferente debido a que se le incorpora todo lo necesario para imitar los movimientos de un boxeador.
Parte inferior
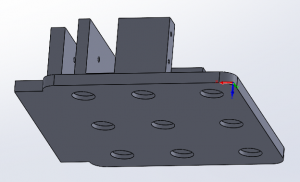
La parte inferior esta constituida por tres piezas. La primera pieza son los pies del robot los cuales tendrán encajados el servo que realizará el movimiento de «tobillo» . El criterio utilizado para el diseño de esta pieza es la superficie del pie, esto se debe a que a más superficie más estabilidad tiene el robot pero puede haber colisiones entre las piezas. Además, se diseño con uno pequeños surcos que se rellenaran de silicona para asegurar el agarre del robot.
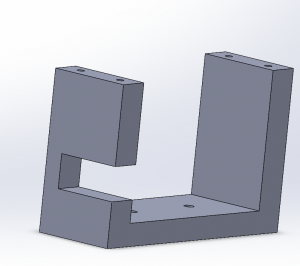
La siguiente pieza se une tanto al pie como al servo encajado a este y ejercería una función de pierna. Por último, la tercera pieza tiene la función de sujetar el servo que ejercerá como movimiento de cadera.
Parte superior
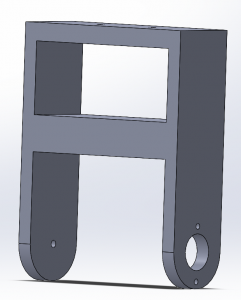
La parte superior del robot tiene siete piezas con diversas funciones. En primer lugar se encuentra la cadera la cual enlazará el los servos de las piernas y tendrá la función soporte de el servo shield y el tronco del robot.
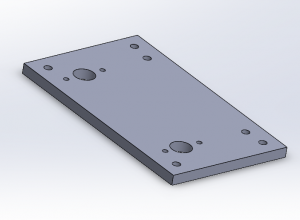
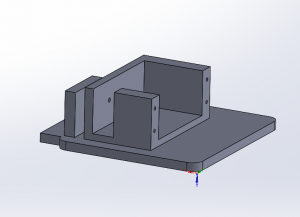
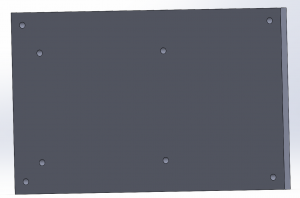
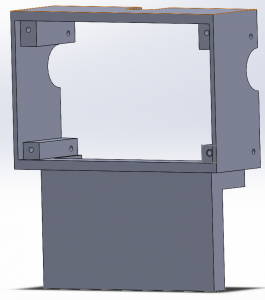
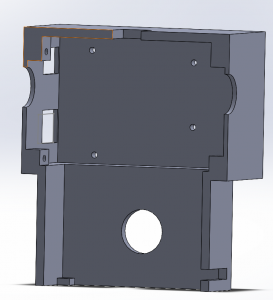
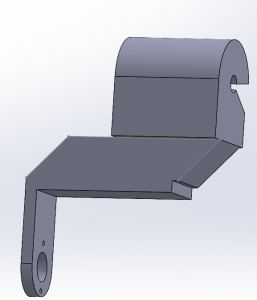
La parte del torso tiene tres piezas. Una primera pieza que ejerce de espalda del robot y tiene la función de albergar toda la electrónica además de dos de los servos encargados de realizar los movimientos de hombro. Por otra parte, la segunda pieza la cual equivaldría al pecho y tiene una función estructural y contiene un espacio para la batería. Finalmente, una tercera pieza que se inserta en el pecho la cual se puede retirar para acceder a la electrónica.
Además, el robot tiene dos brazos compuestos por dos piezas. Una primera pieza la cual contiene un servo que ejerce de codo y una segunda pieza que simularía el puño del boxeador.
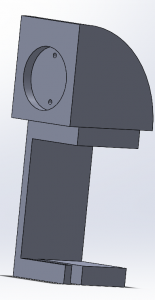
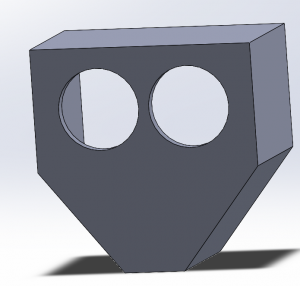
Finalmente se encuentra la cabeza. Esta pieza esta unida a un servo el cual esta encajado en las piezas de pecho y espalda. La función de la cabeza es albergar el sensor de ultrasonidos.
Hardware
El microcontrolador que se utiliza es una placa ELEGOO R3 UNO el cual tiene un microprocesador ATmega328P que por lo que utiliza el software de Arduino. Además, el robot tiene 8 servos de 13Kg-cm de fuerza de parada con engranaje mecánico alimentados a 5V. Se ha escogido estos servos dada la fuerza necesaria para mover el robot y mantener el equilibrio del robot. Para alimentar y controlar los servos se ha utilizado el servo shield PCA9685 clásico para los proyectos de Arduino. Además, para las funciones de bluetooth LE se ha seleccionado el modulo DSD TECH HC-05.
En lo que alimentación se refiere se utiliza dos componentes. Por una parte, esta la batería recargable de 9V ( la cual acaba decayendo a 7.5V ) de litio. Se utiliza esta batería debido a su tamaño y voltaje, sin embargo, tiene una duración algo baja pero aceptable. Por otra parte, Se ha utilizado un step-down con al intención de adaptar el voltaje al requerido por la electrónica además de entregar suficiente potencia para mover los servos.
Finalmente, se utiliza un único sensor de ultrasonidos ELEGOO HC-SR04 dado que es el más óptimo para este tipo de proyectos tanto su calidad como su precio.
Software
Se han programado tres programas distintos utilizando el lenguaje de programación de Arduino. Para poder realizar los tres programas se han creado diversas funciones generales con tal de poder aplicarlas a cualquier programa. Las funciones más básicas están relacionadas con el movimiento y coordinación de los servos , es decir, mover varios servos a la vez a ciertas posiciones en un determinado tiempo.
Una vez creadas esas funciones básicas se han creado unas funciones mas avanzadas donde se realizan movimientos básicos como andar hacia adelante, girar, o los diversos golpes y posturas que puede realizar el robot.
Por otra parte, se ha creado una app mediante la plataforma Thunkable X que se aplicará en al función de control remoto. Esta aplicación consiste en una serie de botones que cada uno corresponde a una función o movimiento. Cada uno de estos botones al pulsarse envía un carácter mediante bluetooth y este carácter se gestiona en el microcontrolador realizando la acción que le corresponde.
 [:]
[:]