[:es]En esta entrada os mostramos la creación y funcionamiento del robot DYOR «Leonardo»
Objetivo:
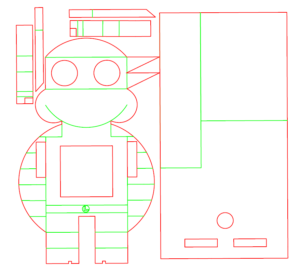
El objetivo, es la creación de un robot móvil, basado en una tortuga ninja. Este será capaz de mover los brazos hacia arriba o hacia abajo, moverse en cualquier dirección, emitir un chillido, seguir una línea negra y detectar obstáculos.
Este robot, dispondrá de una base, donde se colocará la batería portátil, el microcontrolador ESP32 D1 y todos los cables que conectarán los diferentes sensores y dispositivos al ESP32.
Por debajo de esta base, se colocarán los dos servos de 360º FS90R, que harán girar dos ruedas. También se colocará una rueda loca.
Dispondrá de un frontal, donde se sitúan los ojos del robot, que en el estará instalado un sensor de ultrasonidos HC-SR04.
Detrás del frontal se realizarán todas las conexiones de estos sensores, y además se colocarán dos servos de 180º SG90, que será capaces de mover los brazos del robot. También se colocará por detrás un zumbador, que simulará una canción.
Debajo del frontal, se colocará el módulo del sensor seguilíneas TCRT5000.
El robot dispondrá de dos “espadas” que será pegadas a los brazos.
Diseño:

Componentes electrónicos:
A continuación, se detallan el número y el tipo de materiales que se necesitarán para su creación:
- Fabricación de Piezas Corte Láser «Tortuga Ninja Leonardo»
- ESP32 D1 R32 Wifi y Bluetooth
- Micro servo FS90R x2
- Micro servo SG90 x2
- Rueda FS90R x2
- Rueda loca
- Sensor ultrasonidos HC-SR04
- Módulo siguelíneas TCRT5000
- Matriz LEDs 8×8
- Batería portátil 5 V
- Batería Lipo 3,7 V
- Controlador de Servomotores PCA9685
- Módulo step-up
- Módulo carga batería lipo
- Interruptor dos posiciones
Aplicación Móvil:
Mediante esta aplicación, seremos capaces de controlar el robot Leonardo. Esta aplicación tiene dos modos principales de funcionamiento:
El primero sería el del control cinemático, capaz de mover en cualquier dirección al robot y mover los brazos, simulando un ataque con las espadas.
El segundo serían los «modos de juego», el robot puede; emitir una canción, realizar un seguimiento de línea negra o evitar cualquier obstáculo, cambiando de dirección.


Resultado final y funcionamiento (vídeos):
Por último, vamos a ver una serie de vídeos realizando las funcionalidades explicadas anteriormente.

Funcionamiento modo «Siguelíneas»
Funcionamiento modo «EvitaObstáculos»
Autor
Santiago Torres Yébenes.[:]