[:es]Mini Kame es un robot cuadrúpedo de ocho servomotores que cuenta con dos modos de funcionamiento: un modo manual en el que se dirige su movimiento mediante una aplicación móvil y un modo automático en el que se dirige su movimiento mediante un algoritmo que hace uso de los datos provenientes de un sensor de distancia ultrasónico. Para el control del robot se ha creado una aplicación móvil mediante la herramienta MIT App Inventor que nos permite decidir el modo de funcionamiento y controlarlo manualmente.
Descripción del robot
Este es un robot móvil cuadrúpedo que utiliza 8 servomotores sg90, cada pata contiene dos servos que controlan respectivamente el ángulo de giro y la inclinación de esta. Las acciones de dichos motores dependerán de los datos que se reciban de un sensor sónar que se encuentra al frente del robot para detectar obstáculos o del control manual que se envíe desde la app.
Todo esto está controlado mediante un microcontrolador ESP32, puesto que cuenta con conexión por Bluetooth y ello nos permitirá controlar el robot enviando datos por este medio desde una aplicación instalada en nuestro teléfono móvil.
Diseño de las piezas


Diseño de la articulación de una pata
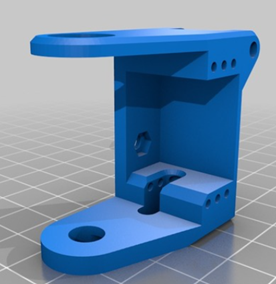
Diseño de la sujeción de la pata al cuerpo
Este robot está basado en el robot basado en el diseño de Kame: 8DOF creado por Javier Isabel de la empresa BQEducation, al cual se le introducirán ciertas modificaciones, tales como la integración de nuevos sensores y la adaptación del diseño para el uso de diferentes motores. Estas modificaciones nos permiten usar servomotores sg90 y un sensor de proximidad. También se ha usado el diseño de “Bushing 3x8x4 flanged” creado por matn1en Thingiverse para evitar usar rodamientos.
Diseño electrónico
Para el diseño de la electrónica de nuestro robot se han usado los componentes siguientes:
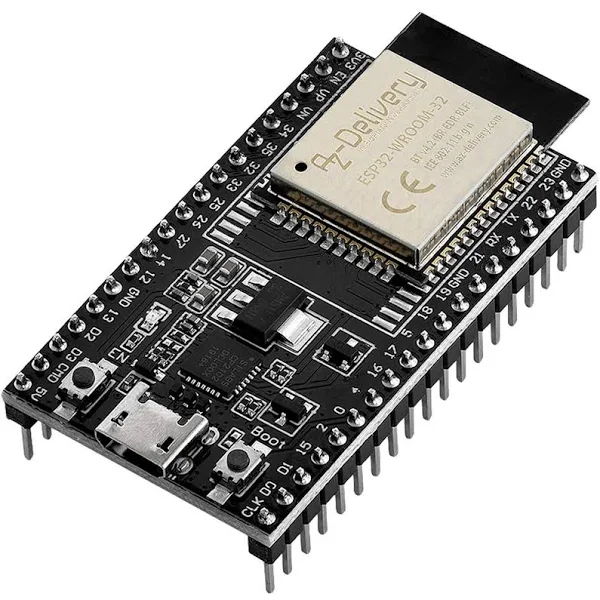



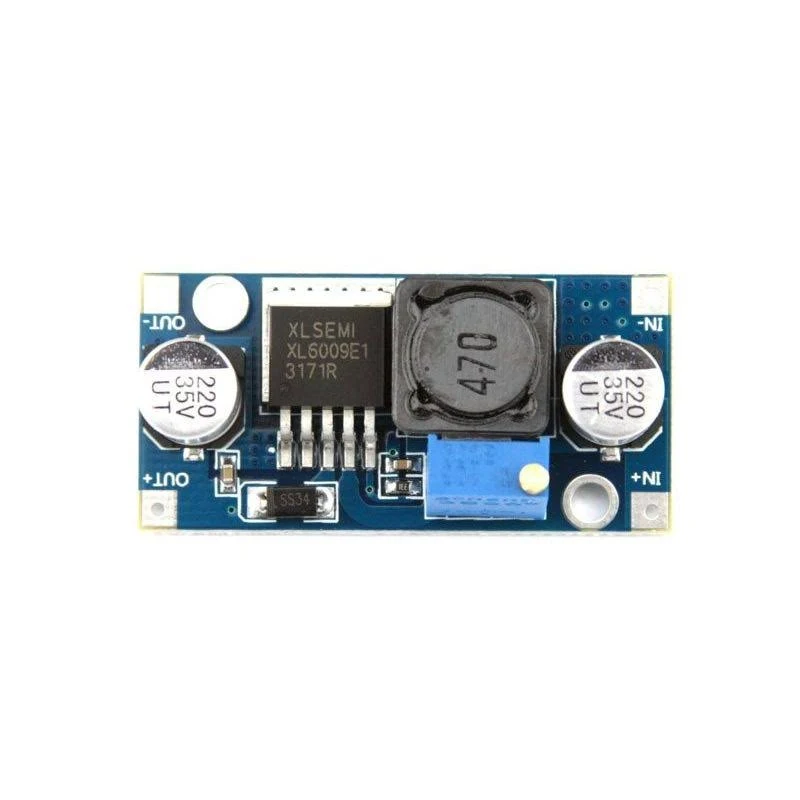



Estos son los componentes que forman el circuito electrónico de el robot. El esp32 controla ejecuta el código que hemos implementado, el PCA9685 activa y mueve los servos que le indica el esp32, el sensor de ultrasonidos mide la distancia a los obstáculos que hay frente al robot y la alimentación proviene de dos baterías lipo en paralelo cuya tensión se aumenta con un convertidor DC-DC tipo boost, sin embargo esto no proporciona suficiente corriente para algunas funcionalidades por lo que es necesario conectar una powerbank en la entrada usb del microcontrolador.
Aplicación móvil

Este es el diseño de la aplicación móvil cuyos botones hacen lo siguiente: Conectar y desconectar de Bluetooth ,Indicar al robot que se agache, se levante, salude, se mueva hacia adelante. atrás, a la derecha y a la izquierda y conectar el modo de funcionamiento automático con el slider en la parte superior.
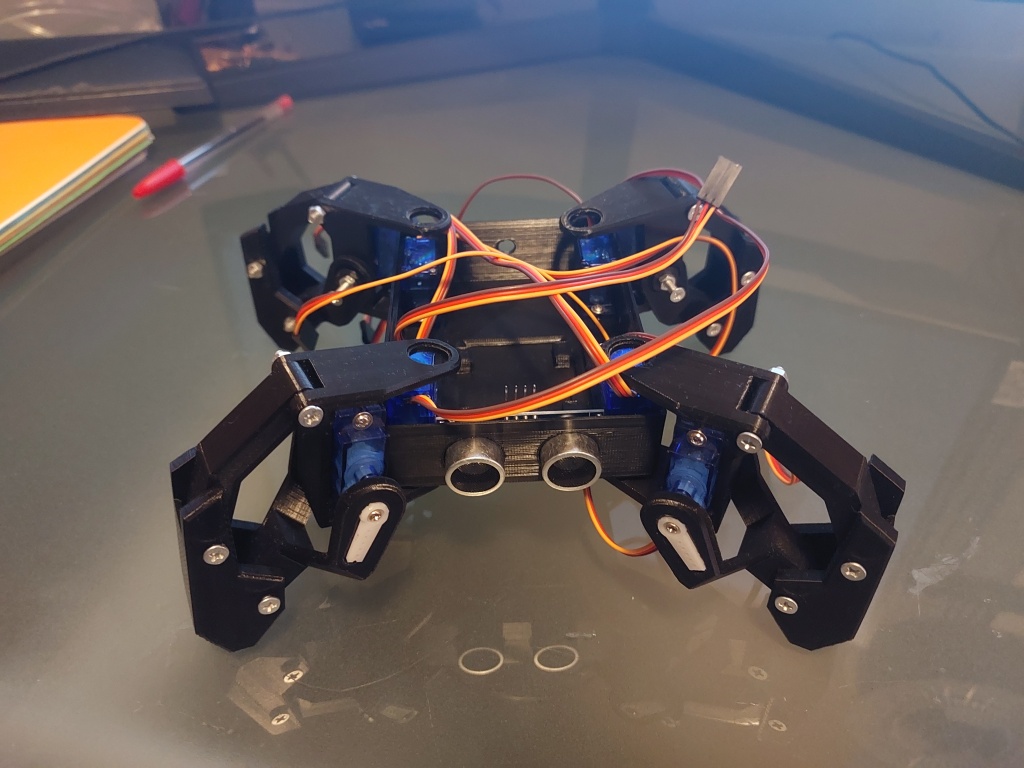
Resultado final y funcionamiento
En los siguientes fotos y videos se muestra como ha resultado el proyecto y parte de sus funcionalidades.

[:]