[:es]En esta entrada se va a mostrar como se ha diseñado, montado y programado un robot DYOR OnePice controlado por control remoto y capaz de evitar obstáculos o seguir líneas.

Figura 1: Robot montado
Diseño
Para este robot se ha realizado el diseño usando SolidWorks, un software de diseño 3D. El diseño del robot se ha basado en un serie de anime llamada One Piece, tomando como referencia la bandera pirata del grupo protagonista para hacer el frente del robot y el puño del protagonista para la realización de las pinzas.

Figura 2: Frente del DYOR One Piece

Figura 3: Bandera pirata

Figura 4: Puño
El diseño del frente usado se hizo tanto para impresión 3D (añadiéndole relieve) tanto para corte láser (añadiéndole un grabado de los detalles), el puño se diseñó para corte laser añadiéndole también un grabado; y la base, para impresión 3D, añadiéndole un soporte para los servomotores de las ruedas.
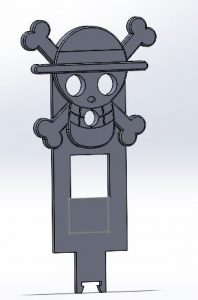
Figura 5: Frente impresión 3D
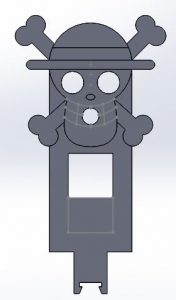
Figura 6: Frente corte láser
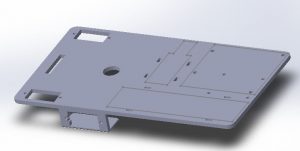
Figura 7: Base
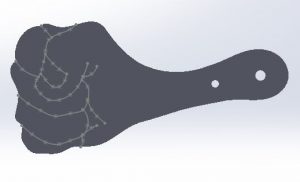
Figura 8: Puño
Para el montaje del robot se hizo uso de bridas, cinta aislante y tornillos para fijar los componentes.
Componentes electrónicos
- Arduino Nano
- 2 servomotores continuos FS90R
- 2 servomotores SG90
- Buzzer pasivo KY-006
- Matriz de LEDs max7219
- Sensor infrarrojo TCRT5000
- Sensor ultrasonidos HC-SR04
- Módulo bluetooth SPP-C
- Batería Powerbank
- I/O extension shield para Arduino Nano
Para el movimiento del robot se han necesitado también dos ruedas de 60 mm de diámetro y una rueda loca.
Interfaz
Para el control del robot se ha creado una app para teléfono móvil mediante el entorno de desarrollo software Appinventor 2. La idea detrás de esto es controlar el robot mediante bluetooth con el teléfono móvil. En esta interfaz se puede elegir el modo de funcionamiento, el accionamiento de las pinzas, las expresiones de la matriz de LEDs, la emisión de distintos sonidos, la conexión y desconexión con el SPP-C y el control del robot en modo manual.
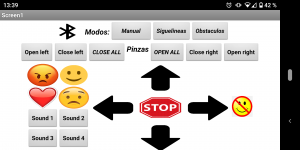
Figura 9: Interfaz de la app
Figura 10: Programación de la app
Funcionamiento
En primer lugar se debe de conectar el móvil con el dispositivo bluetooth para que el robot pueda funcionar. Una vez hecho eso, se debe seleccionar uno de los tres modos de funcionamiento, siendo el modo manual el que se inicia por defecto. El botón del modo seleccionado aparece de color verde y los no seleccionados, en rojo. Cuando el modo no es el manual, para parar el robot hay que pulsar el botón de manual, el cual en esos casos tendrá la forma de la señal de stop.
Modo Manual: En este modo el robot se puede controlar usando los botones en forma de flechas y el botón de stop que hay en el centro de la pantalla.
Modo Sigue líneas: Haciendo uso de su sensor infrarrojos, el robot seguirá una línea negra en el suelo.
Modo Evita obstáculos: Haciendo uso de su sensor ultrasonidos, detectará los objetos que tenga de frente y si está muy cerca, el robot girará 90º.
En los tres modos se pueden emitir sonidos y generar expresiones en la matriz de LEDs, sin embargo solo se pueden mover las pinzas en los modos manual y sigue líneas. Esto se ha hecho así para favorecer el giro cuando se encuentre un obstáculo, evitando que las pinzas estén abiertas y puedan chocar con algo.
Vídeo de ejemplo del modo sigue líneas
Archivos
Ficheros .SLDPRT de las partes del robot, fichero .txt con el código empleado y fichero .apk con la app:
Autor
José Antonio Méndez Ibarra
Trabajo realizado para la asignatura de Robótica Móvil
Grado en ingeniería electrónica industrial y automática
Escuela Técnica Superior de Ingeniería del Diseño
Universidad Politécnica de Valencia
[:]