[:es]En esta entrada se muestra el diseño y aplicaciones que realiza el robot Vader.
DISEÑO
Se ha procedido al diseño del robot mediante la aplicación Solidworks, empleando las piezas ya disponibles del robot, y diseñando las que faltaban.
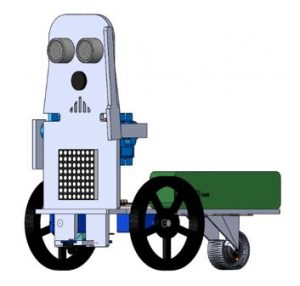
COMPONENTES
Para el montaje del robot se han utilizado los siguientes componentes:
- Piezas del robot en corte láser, en madera
- Arduino NANO
- I/O Extension Shield para Arduino
- Cable mini-USB
- Powerbank 3600 mAh
- 2 micro-servo SG90
- Rueda loca
- Sensor ultrasonidos HC-SR04
- Zumbador KY-006
- Matriz de Leds 8×8 max7219
- Módulo sigue líneas TCRT500
- SPP-C Bluetooth
- Cables Hembra-Hembra de 20 cm
- 2 rueda FS90R
- 2 micro-servo FS90R

APLICACIONES
Se han creado una serie de aplicaciones para realizar con el robot Vader, las cuales son una aplicación de evasión de obstáculos, un sigue líneas y una aplicación móvil mediante Bluetooth.
Evasión de obstáculos
En esta aplicación, el robot se mueve por el entorno en línea recta. Cuando detecta un obstáculo, este se para y gira 90 grados para evitar el obstáculo. Si una vez ha realizado el giro sigue encontrando el obstáculo, este realiza otro giro de 90 grados, hasta que encuentre el camino libre y siga en línea recta. Durante esta aplicación, el robot entona la canción de la Guerra de las Galaxias mediante el zumbador.
Sigue líneas
En esta aplicación, el robot utiliza el sensor TCRT500 para detectar la línea negra que debe de seguir. Si el robot no detecta la línea o detecta una superfície de una color más claro, gira hasta volver a detectar la línea negra que forma el circuito.
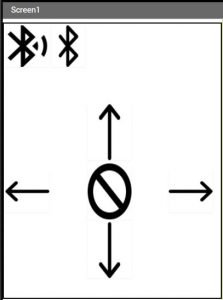
Aplicación Bluetooth
Se ha utilizado el programa AppInventor para crear la plicación. Se ha creado una interfaz de usuario con botones, los cuales permiten dirigir el robot hacia delante, hacia atrás, hacer que gire tanto a la izquierda como a la derecha y detenerlo.
VÍDEOS