[:es]Robot DYOR qPed con cuatro patas.
Durante este artículo se introducirá al diseño, componentes electrónicos y el funcionamiento de un robot qped con un diseño casi idéntico al ofrecido por DYOR. Además se realizará una breve introducción a la app empleada para controlar al robot desde un smartphone.

Img1. Robot montado
Diseño
Como bien se ha comentado anteriormente es un diseño casi idéntico al que podemos encontrar en la página web de DYOR-Robótica Fácil. Para la impresión de las piezas via impresora 3D previamente se realizaron los bocetos con el programa SOLIDWORK.
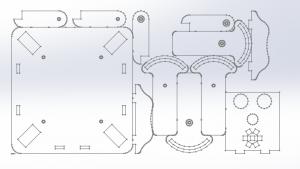
Img2. Plano del robot
Una vez teniendo el esquema con todas las piezas se procedió a convertir cada una de estas a modelos 3D con un grosor de 3mm que más tarde serian enviados directamente a la impresora.
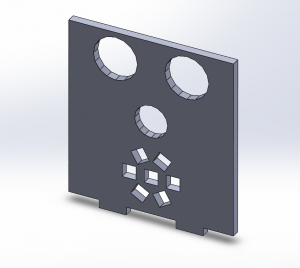
Img3. Pieza en 3D
Es bastante recomendable que una vez se tengan todas las piezas en modelado 3D se compruebe que no se genera ningun problema relacionado con la dinámica del robot realizando un ensamblaje.
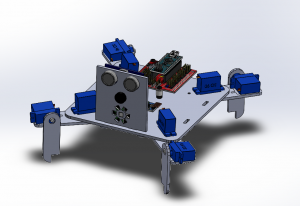
Img4. Ensamblaje
Componentes
- Arduino Nano
- Shield Arduino Nano
- 8 Servomotores sg90
- Sensor de ultrasonidos SR04
- Módulo Bluetooth HM10
- Zumbador pasivo
- Pila 9V 600mA + cable adaptador para el shield
- Cables hembra-hembra para Arduino.
Funcionamiento
Como el principal objetivo fue controlar el robot mediante una app desde un smartphone la primera parte del código iba destinado a mantener una comunicación constante con el módulo bluetooth. Una vez realizada la comunicación la siguiente parte del código está compuesta por una estructura de tipo switch donde dependiendo del carácter enviado desde la app se ejecutaría cierta función. Entre ellas podemos encontrar:
- Movimiento hacia delante.
- Movimiento hacia atrás.
- Movimientos laterales.
- Giro izq/der.
- Laberinto
- Baile
- Música.
Estas funciones las podemos dividir entre cada una de las actividades que queremos que realice el robot, siendo las cuatro primeras destinadas al control remoto, las dos últimas para realizar un pequeño baile y que el buzzer emita una melodía y finalmente el laberinto donde se integran las funciones de movimiento hacia delante, giro y se emplea el sensor de ultrasonido para detectar un obstáculo (en el caso en el que se detecte una pared se girarán unos 90º).
Una observación interesante sobre la función de baile y música es que para unir ambas en un mismo código y que el robot pueda realizar las funciones se empleó el programa FACILINO el cual permitió mediante una programación por bloques la creación de un código Arduino que a su vez mediante interrupciones posibilitó la ejecución de dichas funciones simultáneamente.
Thunkable X
Thunkable X es un web que permite el desarrollo y diseño de programas que permite usar su propia aplicación disponible en google play. El primer paso sería la creación de la interfaz gráfica, gracias a la disposición de los menús, la sencillez y los medios que brinda Thunkable esta tarea se simplifica bastante.

Img5. Interfaz control remoto
Una vez creada la interfaz gráfica se procederá con la programación por bloques donde se destacará el uso de bloques y funciones que permitan la comunicación con nuestro módulo bluetooth y el envio de los caracteres necesarios para la ejecución de las funciones.
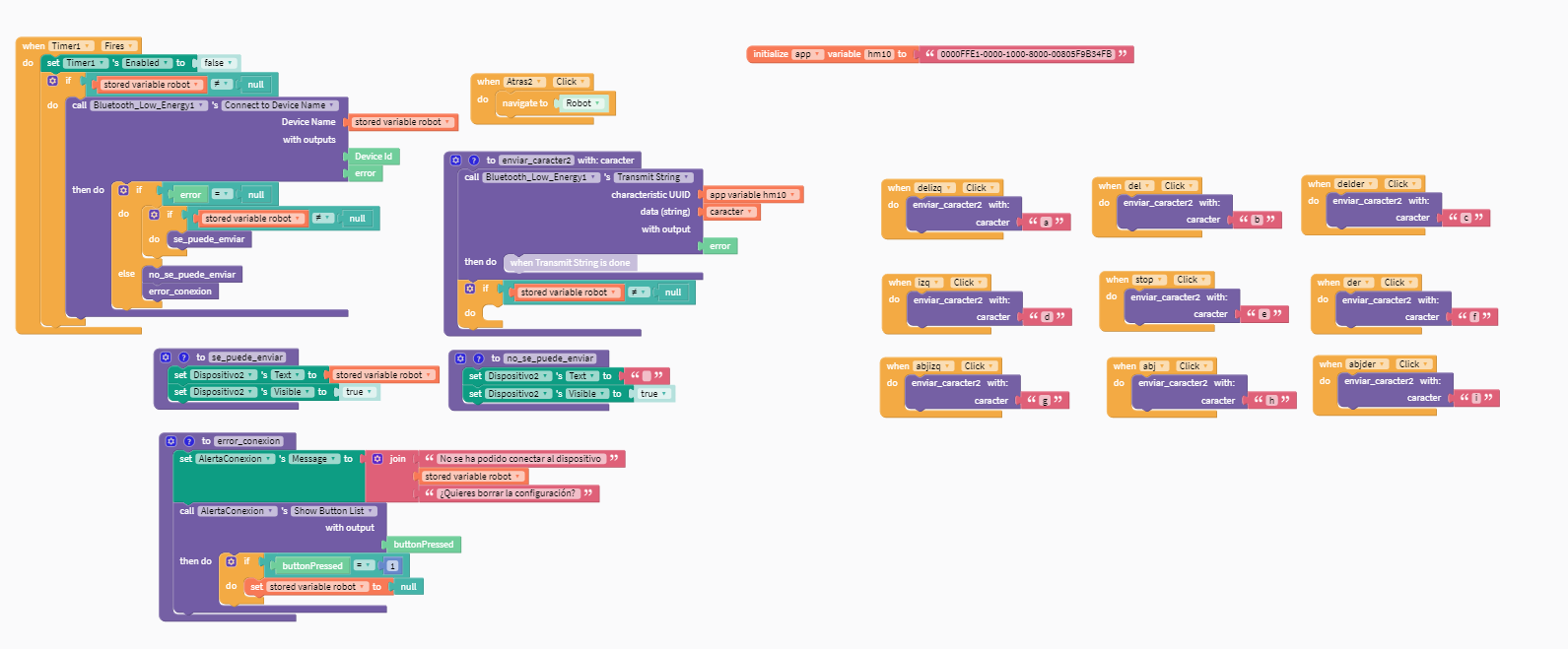
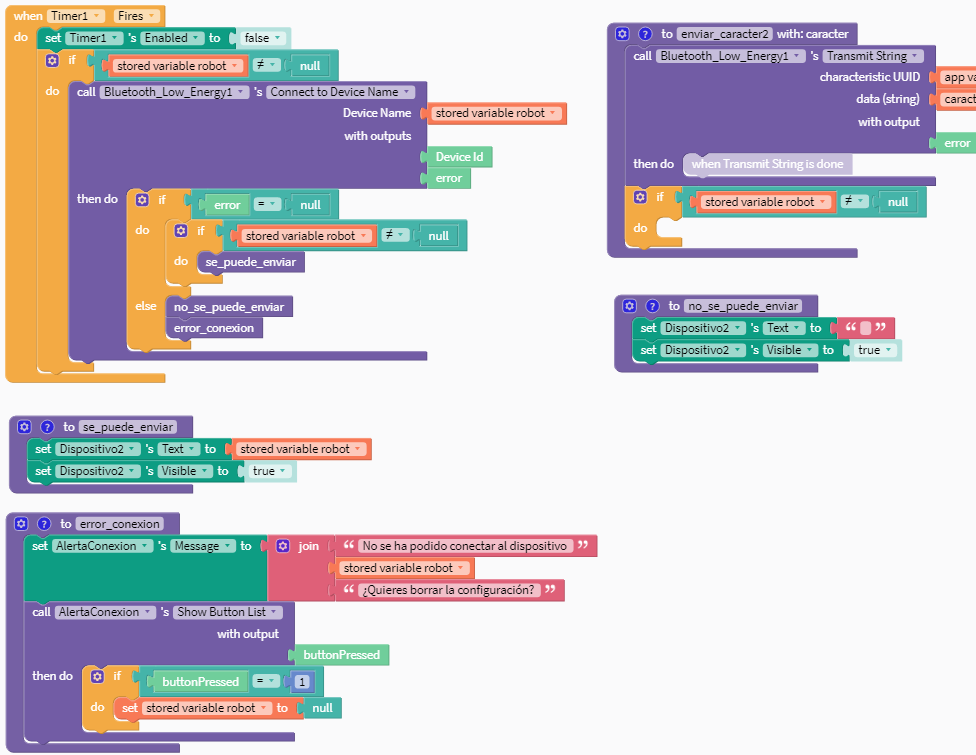
Img6. Bloques control remoto
Jaime Sancha Miguel
Robótica Móvil 2020-2021
ETSID-UPV
[:]