[:es]En esta entrada se muestra el trabajo realizado sobre un robot hexápodo.
Modelo
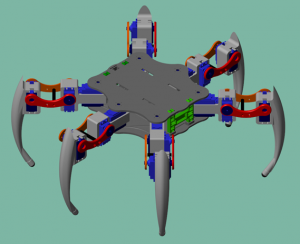
El modelo del robot empleado es de un diseño abierto que se puede encontrar en internet, en concreto se trata del robot «antdroid» (https://antdroid.grigri.cloud/). El robot consta de una gran cantidad de piezas, aunque una de ellas fue modificada para mejorar el rendimiento del robot, en concreto la tapa de los servomotores, que fue rediseñada con SolidWorks. Es posible descargar todo el modelo del hexápodo en el enlace anterior, y la pieza modificada desde en enlace siguiente: https://drive.google.com/drive/folders/1CiJEmsP8ry6UJGy1lGOYkqqgpiC5He5m?usp=sharing.
Implementación
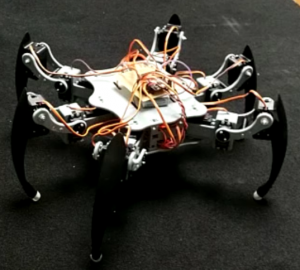
Para construir el modelo se han impreso en 3D todas las piezas, existe una guía del montaje en la página que hace de biblioteca sobre el modelo «antdroid» (https://github.com/antdroid-hexapod/antdroid/wiki). En esta guía se explican todos los pasos del montaje y se dan una serie de recomendaciones acerca de los componentes a emplear; no obstante, aquí se proporcionará una lista de los componentes empleados para esta implementación concreta, además de las propias piezas:
- 18 servomotores Towerpro MG996R
- 1 microcontrolador Wroom esp32
- 1 adaptador de tensión 20A HV SBEC
- 1 batería LiPo 4500mAh 60C 7.4V
- 1 placa perforada para el montaje de la electrónica
- 1 controladora de servos PCA9685
- 18 tornillos M4x16 mm de cabeza hexagonal
- 36 arandelas M4
- 18 cojinetes 4x10x4 mm
- 18 tuercas autoblocantes M4
- 72 tornillos M3x20 mm
- 36 tornillos 2.2×6.5 mm
- 36 tuercas 2.2
Se han empleado algunos tornillos más, pero son aquellos que vienen incluidos junto a los servomotores, por lo que no han sido mencionados.
Programación
A partir de resolver la cinemática directa e inversa de las patas del robot, lo cual se ha realizado con una simulación en Simulink Simscape Multibody, se han implementado una serie de funciones para que las patas realicen movimientos lineales o parabólicos en el espacio de manera coordinada.
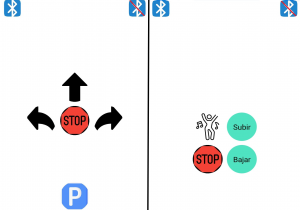
Una vez completadas estas funciones se ha creado un programa para manejar el robot a través del módulo Bluetooth Low Energy que incluye el microcontrolador ESP32, empleando una aplicación diseñada con Thunkable X. En este caso se han diseñado dos funcionalidades manejables desde el móvil, una para mover al robot, donde se le puede hacer avanzar, detenerse y girar en ambos sentidos; y otra donde el robot realiza una serie de movimientos con dos patas mientras mantiene apoyadas las cuatro restantes, como si estuviese realizando alguna clase de baile. Con esta última aplicación se pueden observar las amplias posibilidades que ofrece el control de un robot caminante a través de su cinemática.
Videos
Autor: David Laseca Pérez
Contacto: david12357111317@gmail.com
[:]